如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
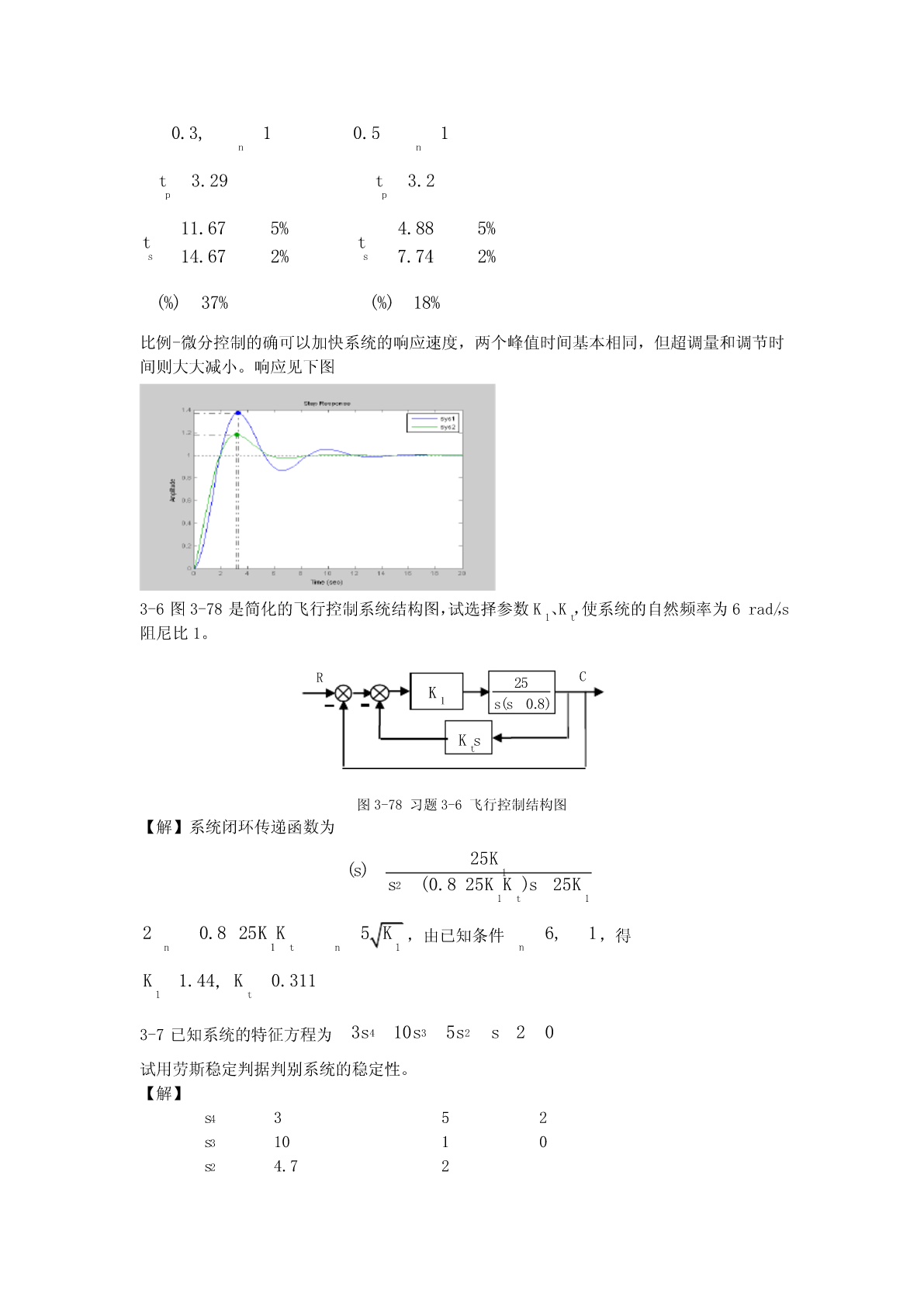
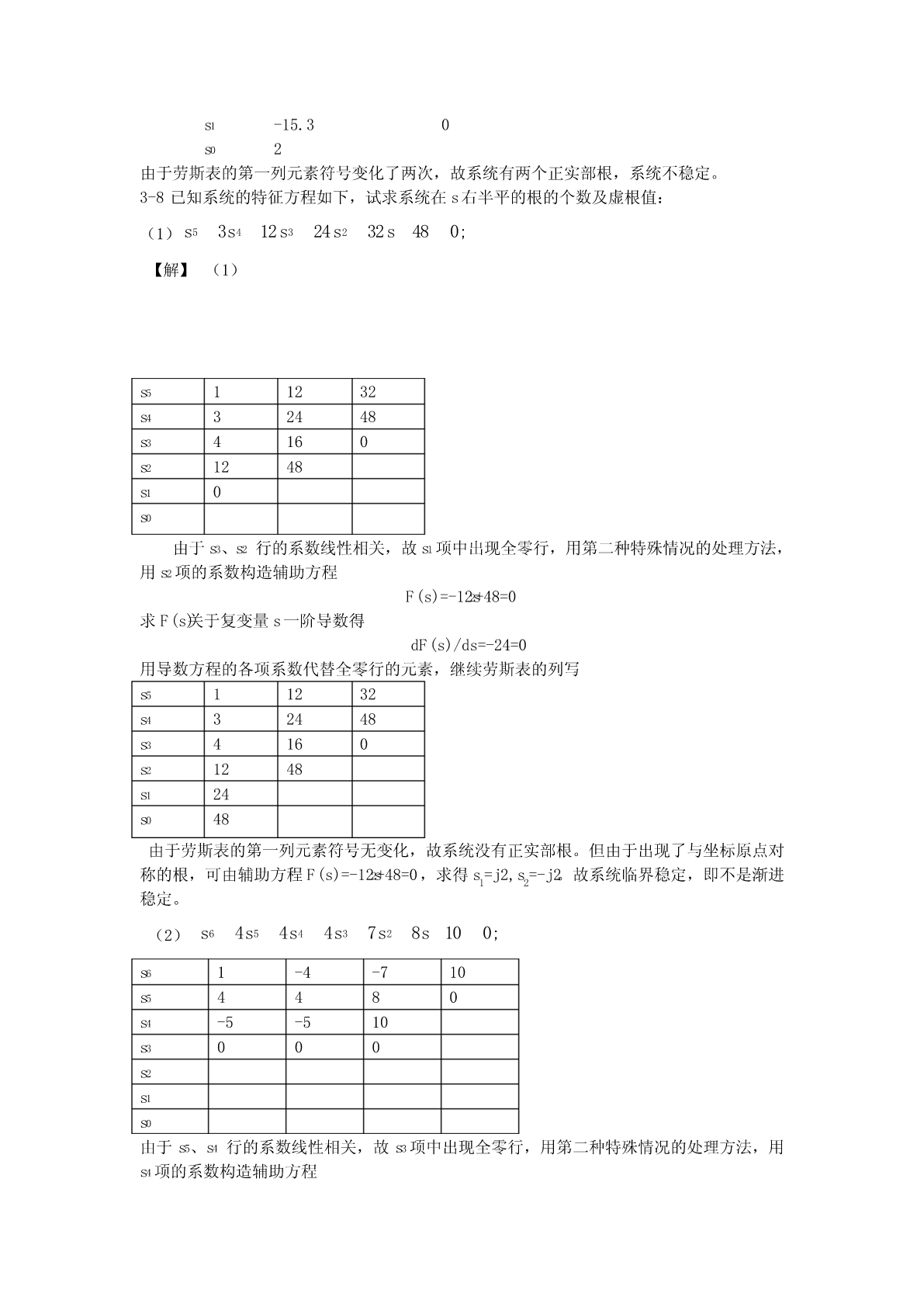
自控习题及解答第三章3-2某温度计插入温度恒定的热水后,其显示温度随时间的变化规律可用一阶系统的响应来描述,实验测得当t=60s时,温度计度数达到实际水温的95%,试确定该温度计的传递函数。11【解】用一阶系统的模型,G(s),3T60秒,故T20,G(s)Ts120s13-3在用温度计测量容器内的水温时,发现需要1min的时间才能指示其实际温度的98%,如果容器内的水温以100C/min的速度线性增加,试求温度计的稳态误差。1【解】用一阶系统的模型,G(s),4T1分钟,故T0.25分钟Ts1容器内的水温以100C/min的速度线性增加时,可认为是斜率是100C/分钟的斜坡输入,此时的稳态误差为e10T2.50Css3-4已知系统单位阶跃响应为h(t)1012.5e1.2tsin(1.6t53.10)试求系统的超调量σ%、峰值时间t和调节时间t。ps【解】,由已知表达式可知,该系统为欠阻尼的二阶系统,有h(t)10(11.25e1.2tsin(1.6t53.10)1t210(1ensin(1t)12nacosacos53.100.6,1.2/2nt1.96,(%)e/12100%9.4%p12dn3.52.925%tns4.43.672%n3-5设单位反馈系统的开环传递函数为10.4s1(1)G(s),(2)G(s)s(s0.6)s(s0.6)试求系统(1)、(2)在单位阶跃输入下的动态性能指标。并通过计算说明比例-微分控制的作用。【解】系统的闭环传递函数为10.4s1(1).(s),(2).(s)s20.6s1s2s10.3,10.51nnt3.29t3.2pp11.675%4.885%tts14.672%s7.742%(%)37%(%)18%比例-微分控制的确可以加快系统的响应速度,两个峰值时间基本相同,但超调量和调节时间则大大减小。响应见下图3-6图3-78是简化的飞行控制系统结构图,试选择参数K、K,使系统的自然频率为6rad/s,1t阻尼比1。R25CK1s(s0.8)Kst图3-78习题3-6飞行控制结构图【解】系统闭环传递函数为25K(s)1s2(0.825KK)s25K1t120.825KK5K,由已知条件6,1,得n1tn1nK1.44,K0.3111t3-7已知系统的特征方程为3s410s35s2s20试用劳斯稳定判据判别系统的稳定性。【解】s4352s31010s24.72s1-15.30s02由于劳斯表的第一列元素符号变化了两次,故系统有两个正实部根,系统不稳定。3-8已知系统的特征方程如下,试求系统在s右半平的根的个数及虚根值:(1)s53s412s324s232s480;【解】(1)s511232s432448s34160s21248s10s0由于s3、s2行的系数线性相关,故s1项中出现全零行,用第二种特殊情况的处理方法,用s2项的系数构造辅助方程F(s)=-12s2+48=0求F(s)关于复变量s一阶导数得dF(s)/ds=-24=0用导数方程的各项系数代替全零行的元素,继续劳斯表的列写s511232s432448s34160s21248s124s048由于劳斯表的第一列元素符号无变化,故系统没有正实部根。但由于出现了与坐标原点对称的根,可由辅助方程F(s)=-12s2+48=0,求得s=j2,s=-j2。故系统临界稳定,即不是渐进12稳定。(2)s64s54s44s37s28s100;s61-4-710s54480s4-5-510s3000s2s1s0由于s5、s4行的系数线性相关,故s3项中出现全零行,用第二种特殊情况的处理方法,用s4项的系数构造辅助方程F(s)=--5s4-5s2+10=0求F(s)关于复变量s一阶导数得dF(s)/ds=--20s2-10=0用导数方程的各项系数代替全零行的元素,继续劳斯表的列写s61-4-710s54480s4-5-510s3-20-100s22.510s