如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
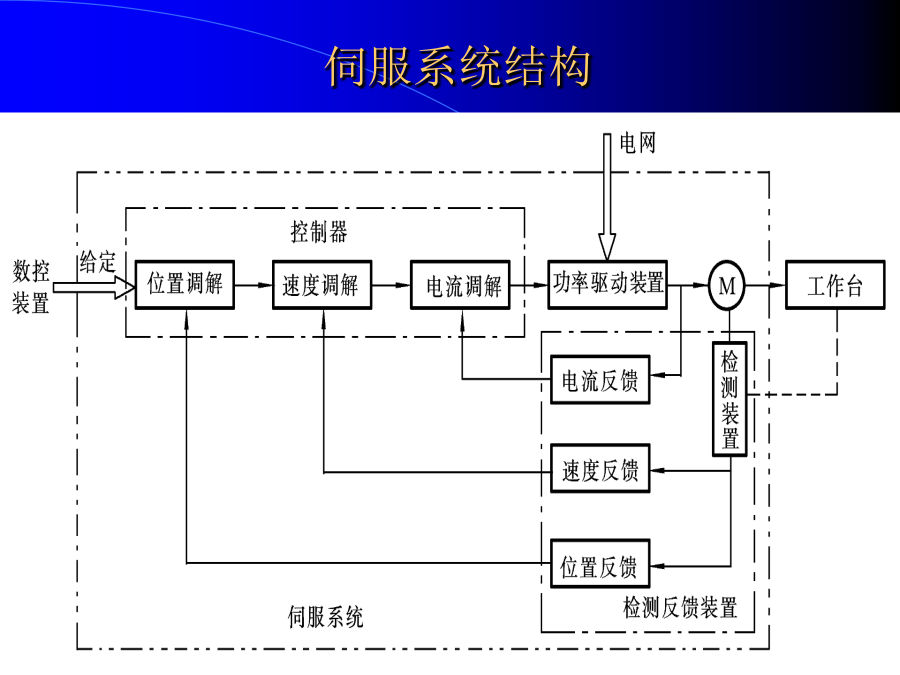
第7章数控机床的伺服系统数控系统发出指令脉冲经过驱动线路变换与放大,传给步进电机。步进电机每接收一个指令脉冲,就旋转一个角度,再通过齿轮副和丝杠螺母副带动机床工作台移动。指令脉冲的频率决定了步进电机的转速,进而决定了工作台的移动速度;指令脉冲的数量决定了步进电机转动的角度,进而决定了工作台的位移大小。开环伺服系统加工精度低。由于无位置检测装置,其精度取决于步进电机的步距精度和工作频率以及传动机构的传动精度。结构简单,成本较低,适用于对精度和速度要求不高的经济型、中小型数控系统。(2)闭环伺服系统有位置检测装置,且装在机床工作台上,直接检测工作台的实际位移。利用CNC装置的指令值与位置检测装置的检测值的差值进行位置控制。精度高,其运动精度取决于检测装置的精度,与传动链的误差无关。适用于大型或比较精密的数控设备。(3)半闭环伺服系统有位置检测装置,且装在电机或丝杠的端头,检测角位移,间接获得工作台的位移。精度比闭环控制低,滚珠丝杠的精度影响位置检测的精度。适用于中小型数控机床。2.按使用的驱动元件分类3.按被控对象分类4.按反馈比较控制方式分类7.1.2伺服系统的组成伺服系统结构7.1.3数控机床对伺服系统的要求(3)快速响应无超调。快速响应反映系统的跟踪精度。(4)稳定性好,可靠性高。稳定性:系统在给定输入或外界干扰作用下,能经过短暂的调节达到新的或恢复到原来平衡状态。系统具有较好的抗干扰能力能保证进给速度均匀、平稳。(5)足够的传动刚性,较强的过载能力,电机的惯量与移动部件的惯量相匹配,伺服电机能够频繁启停和可逆运行。2.数控机床对主轴伺服系统的要求(1)足够的输出功率。主轴转速高,输出转矩小;主轴转速低,输出转矩大。要求主轴驱动装置具有恒功率性质。(2)调速范围宽。数控机床的变速依照指令自动执行,要求能够在较宽的转速范围内进行无级调速,较少中间传递环节,简化主轴箱。(3)定位准停功能。为使得数控车床具有螺纹切削等功能,要求主轴能与进给驱动实行同步控制。在加工中为自动换刀,要求主轴具有高精度的准停功能。7.2步进电机伺服系统步进式开环伺服系统工作原理改变进给脉冲的方向,可改变定子绕组的通电顺序,使步进电动机正转或反转,从而改变工作台的进给方向。3.工作台进给速度的控制若数控装置发出的进给脉冲的频率为f,经驱动控制线路后,转换为控制步进电动机定子绕组的通电、断电的电平信号变化频率,由于进电动机转子的转速ω=60fδ(δ为脉冲当量),所以定子绕组通电状态的变化频率决定步进电动机转子的转速。该转速经过丝杠副螺母副传递之后,转化为工作台的进给速度,即进给脉冲的频率决定了工作台的进给速度。同时,在相同脉冲频率f的条件下,脉冲当量δ越小,则进给速度越小,进给运动的分辨率和精度越高。综上所述,进给脉冲的数量、频率和方向决定了机床工作台的位移量、速度和方向。步进电机的驱动控制线路当机床在向着正(或负)向进给脉冲的控制下正沿着正(或负)方向进给时,由于各种补偿脉冲的存在,使得可能还会出现极个别的负(或正)向脉冲。这种极个别的脉冲的出现意味着步进电机正在沿着一个方向旋转时,再向相反的方向旋转极个别个步距角。为了达到这一目的,通常采用从正在进给方向的进给脉冲中抵消相同数量的反向补偿脉冲加减速电路:由于进给脉冲经过加减脉冲分配电路后其频率的变化有跳跃,为了使进入步进电机的电信号的频率变化平滑,就使用加减速电路进行缓冲。环形分配器:把来自加减速电路的一串进给脉冲按一定规律分成若干路电平信号去控制步进电机的几个定子绕组,使其正向运转或反向运转。功率放大器:功率放大。1.步进电机的类型2.步进电机的结构定子的每个磁极正对转子的圆弧面上均都均匀分布着5个小齿,呈梳状排列,齿槽等宽,齿间夹角为9°。转子上没有绕组,只有均匀分布的40个小齿,其大小和间距与定子上的完全相同。三相定子磁极上的小齿在空间位置上依次错开1/3齿距。当A相磁极上的小齿与转子上的小齿对齐时,B相磁极上的齿刚好超前(或滞后)转子齿1/3齿距角,即3°;C相磁极齿超前(或滞后)转子齿2/3齿距角。步距角:步进电机每走一步所转过的角度,其大小等于错齿的角度。(2)永磁式步进电机定子和转子中的某一方永永久磁钢,另一方由软磁材料制成,其上由励磁绕组。绕组通电,建立的磁场与永久磁钢的恒定磁场相互作用产生转矩。(3)永磁感应式步进电机转子由环行磁钢及两段铁芯构成。3.反应式步进电机工作原理4.反应式步进电机主要特征(2)静态转矩与矩角特性(3)启动频率启动频率:空载时,步进电机由静止状态突然启动,并进入不丢步的正常运行的最高频率。步进电机带负载下的启动频率要比空载启动频率低,并随负载增加而进一步降低。(4)连续运行的最高工