如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
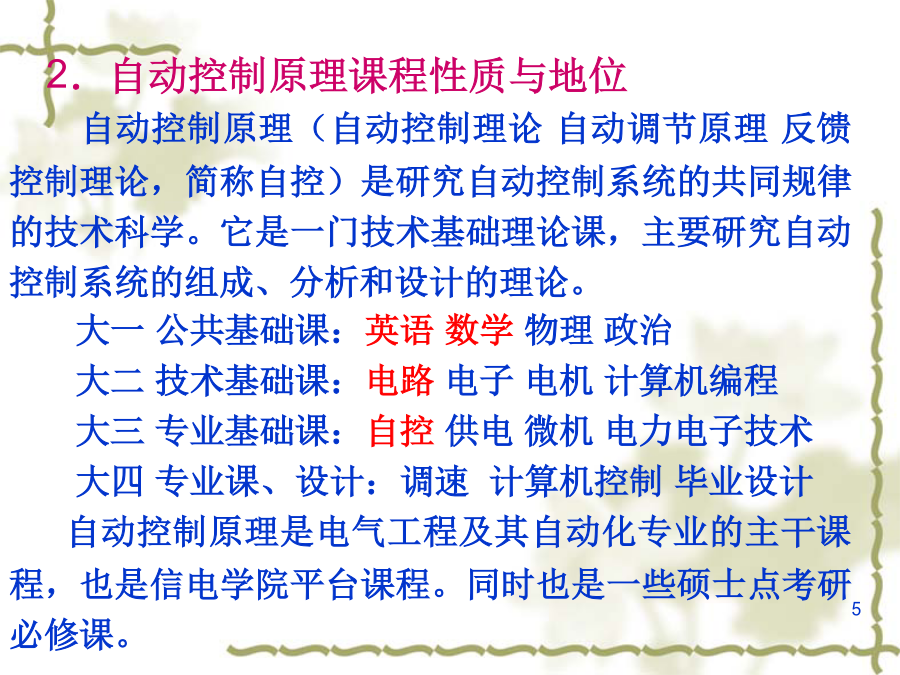
自动控制原理AutomaticControlTheory刘明俊国防科技大学出版社1.人类社会发展的三个时代自动化时代在这个时代中,不仅能量变换、而且信息变换都由机器来完成,在人类活动所见的空间,只要需要用“力”的地方,都会给它配上一个小的脑袋--单片机或微处理器之类的小脑袋。不仅工业生产自动化了,农业生产、家务劳动、交通运输、人居环境……凡是已知的规律,都可以用自动化技术来完成。42.自动控制原理课程性质与地位自动控制原理(自动控制理论自动调节原理反馈控制理论,简称自控)是研究自动控制系统的共同规律的技术科学。它是一门技术基础理论课,主要研究自动控制系统的组成、分析和设计的理论。大一公共基础课:英语数学物理政治大二技术基础课:电路电子电机计算机编程大三专业基础课:自控供电微机电力电子技术大四专业课、设计:调速计算机控制毕业设计自动控制原理是电气工程及其自动化专业的主干课程,也是信电学院平台课程。同时也是一些硕士点考研必修课。上课时间:一共14周,每周2次星期一1~2星期三3~4答疑时间、地点:待定一共64学时,讲课52学时,习题2学时,实验10学时讲课地点:教一南408,402每章学时安排:第一章绪论3学时第二章控制系统的数学描述8学时第三章时域分析法11学时第四章根轨迹法8学时第五章频率响应法14学时第六章控制系统补偿与综合8学时10学时5个实验,各班课代表去联系。联系方式:汪宁老师实验内容:1.典型环节(比例、积分、惯性)测试2.二阶系统单位阶跃响应及性能指标3.高阶系统阶跃响应、根轨迹图绘制4.频率特性(Nyquist图、Bode图)绘制5.校正环节特性及系统阶跃响应4.成绩评定出勤5%作业10%实验15%缺一次扣5分允许补齐考试70%但是卷面成绩不得低于55分,否则按不及格处理。作业缺一半不允许参加考试。5.参考书目1.刘明俊《自动控制原理》国防科技大学出版社2.胡寿松《自动控制原理简明教程》科学出版社3.鄢景华《自动控制原理》哈尔滨工业大学出版社4.吴麒《自动控制原理》清华大学出版社5.李友善《自动控制原理》国防工业出版社6.侯夔龙《自动控制原理》西安交通大学出版社第一章绪论1.1自动控制的基本概念1.2自动控制系统的工作原理开环控制按控制方式闭环控制(反馈控制)复合控制开环控制系统Open-loopControlSystem+闭环(反馈)控制系统Closed-loopControlSystem热力系统的人工反馈控制热力系统的自动反馈控制闭环控制的优缺点反馈控制系统是一种能对输出量与参考输入量进行比较,并力图保持两者之间的既定关系的系统,它利用输出量与输入量的偏差来进行控制。应当指出,反馈控制系统不限于工程范畴,在各种非工程范畴内,诸如社会学、经济学和生物学中,也存在着反馈控制系统。反馈在系统可以分正反馈和负反馈闭环控制系统框图给定电压当炉内实际温度与给定电位计表征的希望高度一致时,热电偶输出电压与给定电压相等,电动机不转动,系统相对平衡。当炉温因扰动出现偏差时(如炉温低于希望值),偏差电压经放大后驱动电动机转动,将调压器电刷向上移动,使电阻丝两端电压增大,从而使炉温升高,趋于希望值。闭环与开环控制系统的比较复合控制系统CompoundControlSystem图1.3干扰补偿的复合控制系统方块图图1.4输入补偿的复合控制系统方块图用“○”号代表比较元件,“—”号代表两者符号相反。信号沿箭头方向从输入端到达输出端的传输通路称前向通路;系统输出量经测量装置反馈到输入端的传输通路称主反馈通路。前向通路与主反馈通路共同构成主回路。此外,还有局部反馈通路以及由它构成的内回路。给定装置:产生给定值或输入信号(量)(即参考量或期望值)测量元件:测量被控制的物理量(被控量),用于产生反馈信号各种传感器:测速发电机、电位计、热电偶等。比较元件:把测量元件检测的实际值(被控量)与给定元件给出的参考量进行比较,求出它们之间的偏差。如差动放大器、自整角机。放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象,如放大器、晶闸管。执行机构:直接推动被控对象,使其被控量发生变化。如步进电机,继电器开关。补偿(校正)元件:结构或参数便于调整的元件或机构,用串联或反馈的方式连接在系统中,以改善控制系统性能。1-4自动控制系统的基本要求稳定的控制系统在阶跃信号或扰动信号的作用下,其响应的暂态过程应该是收敛的。如果系统设计不当,则在阶跃信号下或扰动信号的作用下,相应的幅值振荡可能成为等幅振荡,甚至成为振幅逐渐增大的发散振荡,发生这种情况的系统称为不稳定系统。系统稳定性包括两个方面的含义。(1)系统稳定,称为绝对稳