如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
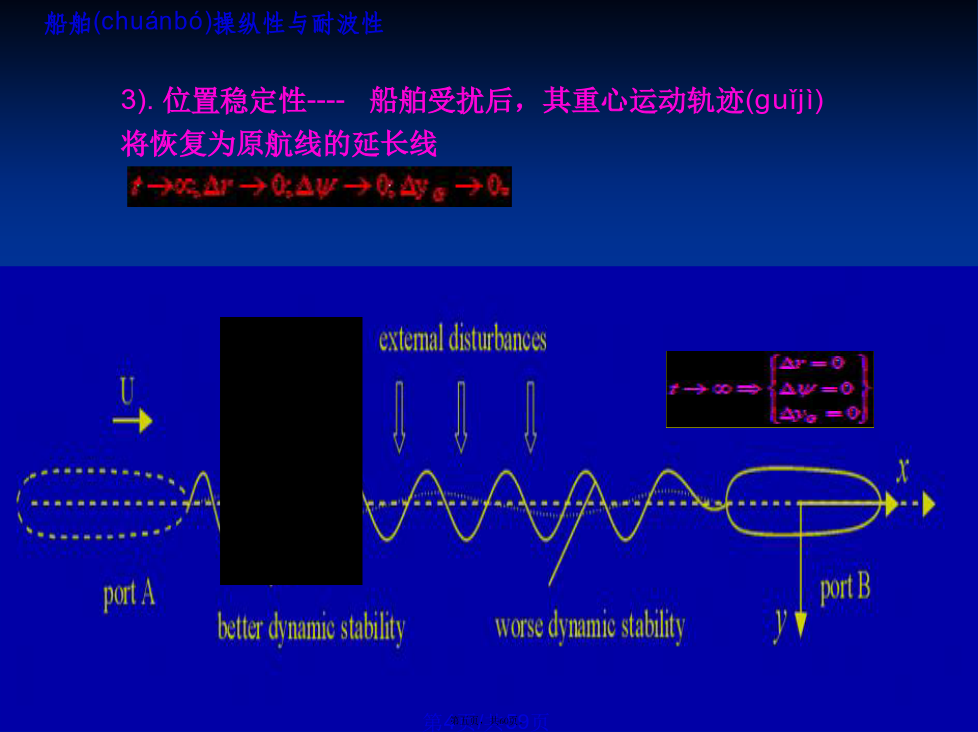
会计学一.基本概念1.稳定性概念:对处于定常运动状态的物体(wùtǐ)(或系统),若受到极小的外界干扰作用,而偏离原定常运动状态,当干扰去除之后,经过一定的过渡,若物体(wùtǐ)(或系统)能回复到原定常运动状态,则称原运动状态是稳定的.物体(wùtǐ)的运动状态是否稳定既取决于物体(wùtǐ)本身的性质,而且也取决于所考察的运动状态和运动参数.具有位置稳定性的船舶一定具有直线稳定性和方向稳定性。具有方向稳定性的船舶一定具有直线稳定性。按是否操舵(cāoduò),稳定性可分为固定稳定性和控制稳定性.前者取决于船体几何形状,后者取决于整个闭合回路的特性。固定稳定性越好的船,控制稳定性也越好。对于通常的水面船舶,只有通过操舵(cāoduò)控制才可能使之具备方向稳定性和位置稳定性。如果不操舵(cāoduò),最多具备直线稳定性.二.研究方法(fāngfǎ)--小挠动方程(2-2)说明(shuōmíng):上式即为纵向速度小扰动方程的解:t→∞,要使扰动速度△u→0,应使负值。m-为船舶本身质量与纵向附连水质量之和,对一般排水量船舶为正值。分子Xu为纵向速度u的增加所引起的纵向分力X的变化率。如下图:在平衡速度u1时,螺旋桨正好克服u1时的船体阻力,故,合力为零。此时产生一个正的扰动速度时,将引起纯阻力的增加,即X的减少。从此图可知在u1处的Xu是一个明显的负值。这样,对特征根而言,分母正而分母负。使之值始终为负,说明(shuōmíng)其对纵向速度扰动总具有稳定性。研究(yánjiū)船舶在水平面内的航向稳定性主要取决于以下二式:由以上解式可知,特征根若具有负实部,则扰动后的扰运动量v,r都回复到原来的状态称之为具有稳定性.但,即使v,r都回复到初始状态参数,却与初始首向仍存在着一个角度偏差(piānchā):可见,对水面船舶不操舵,就不可能实现“方向稳定性”,最多只能是”直线运动稳定性”,习惯上称之为”航向稳定性”三.航向(hángxiàng)稳定性分析三.航向(hángxiàng)稳定性分析稳定性衡准数C稳定性衡准数C航向(hángxiàng)稳定性改善措施航向稳定性改善(gǎishàn)措施§2-3船舶(chuánbó)回转性内容(nèiróng)概要一、基本概念:回转性转舵使船舶作圆弧运动的能力。用回转直径来表示。与船舶避让、避碰、靠离码头、灵活掉头有关定常回转圈操纵性的指标。衡量转首性和回转性的直观方法(fāngfǎ)。回转圈船舶在不同舵角条件下作圆周回转时重心的航行轨迹。定常回转直径Dc定常回转阶段船舶重心点圆形轨迹。战术直径DT从船舶原来航线至船首转向(zhuǎnxiàng)180°时,船总中剖所在位置之间的距离。Dt=(0.9~1.2)D3。纵距L1(Ad)从转舵开始时刻船舶重心G所在的位置,至船首转向(zhuǎnxiàng)90°时船舶纵中剖面沿原航行方向前进的距离4。正横距L2(T)从船舶初始直航线至转向(zhuǎnxiàng)90°时,船舶重心所在位置之间的距离。5.反横距L3(K)从船舶初始的直线航线至回转轨迹反方向最大偏离处的距离K=(0~0.1)D6.进程(jìnchéng)纵距L1–定常回转半径R各类船舶(chuánbó)的相对回转半径定常回转(huízhuǎn)枢心P指从开始转舵(zhuǎnduò)至规定角度δ为止。产生由舵角引起的侧向力Yδδ,和力矩Nδδ.船舶(chuánbó)操纵性与耐波性船舶(chuánbó)操纵性与耐波性初始(chūshǐ)回转的有因次角加速度参数CP转舵结束到进入(jìnrù)定常回转运动为止。船舶(chuánbó)操纵性与耐波性船舶(chuánbó)操纵性与耐波性船舶(chuánbó)操纵性与耐波性船舶(chuánbó)操纵性与耐波性影响定常回转(huízhuǎn)运动的因素影响定常回转(huízhuǎn)运动的因素基本概念:船舶在水平面内作回转运动时会同时产生(chǎnshēng)横摇、纵摇、升沉等运动,以及由于回转过程中阻力增加引起的速降。以上所述可理解为回转运动的耦合,其中以回转横倾与速降最为明显.一、回转(huízhuǎn)横倾一、回转(huízhuǎn)横倾一、回转(huízhuǎn)横倾一、回转(huízhuǎn)横倾回转过程(guòchéng)中横倾角随时间的变化特别(tèbié)指出稳定(wěndìng)横倾角的估算稳定(wěndìng)横倾角的估算稳定(wěndìng)横倾角影响二、回转(huízhuǎn)过程速降二、回转(huízhuǎn)过程速降回转速降系数与相对(xiāngduì)回转直径之间的关系还有杉原、费尔索夫和泽姆辽诺夫斯基等人给出