如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
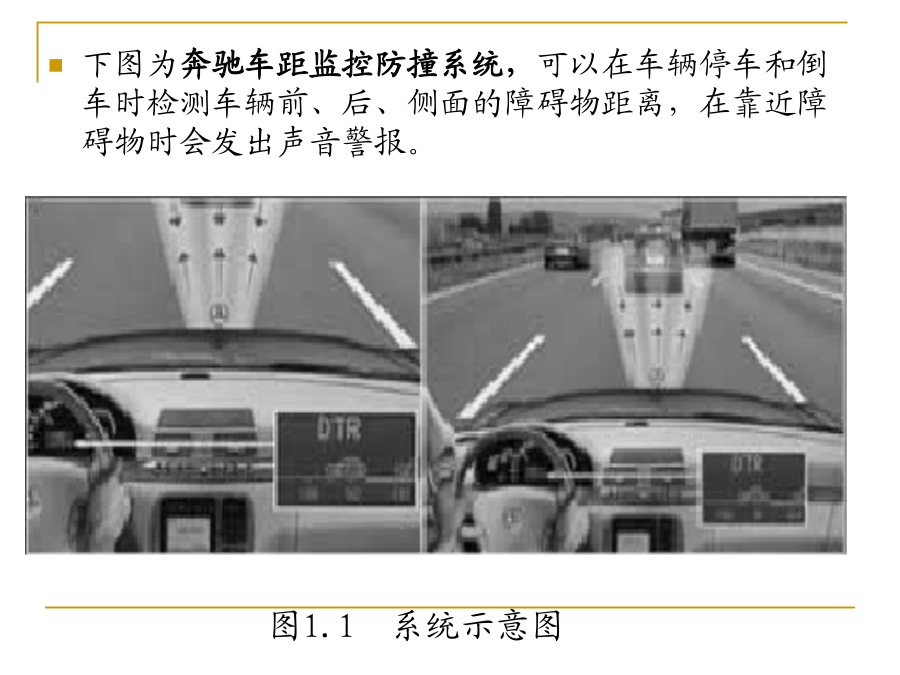
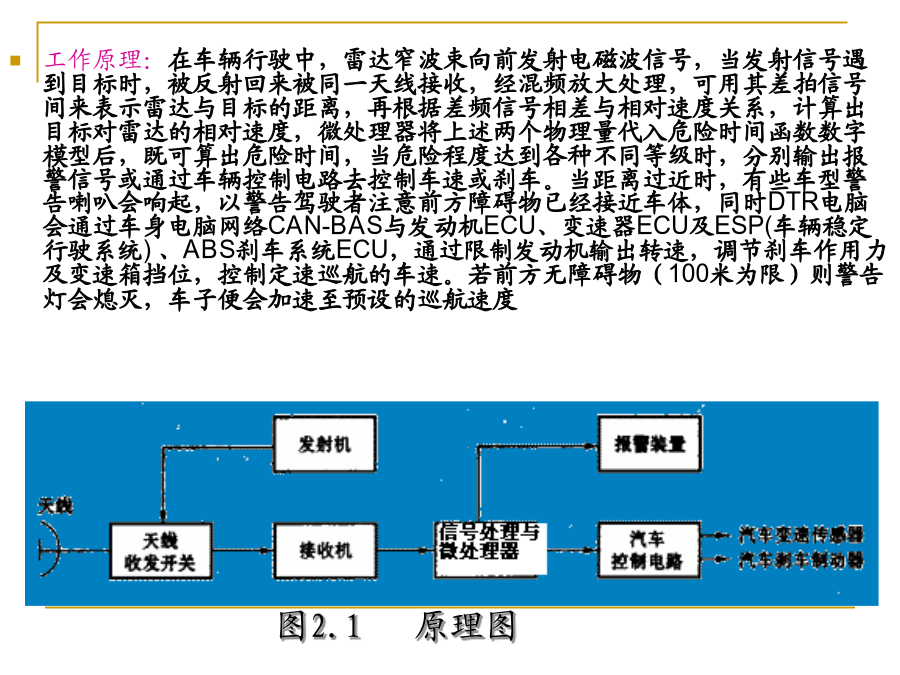
1概述2雷达测距的组成元件3雷达测距的工作原理4雷达测距的性能指标5几种常见的测距雷达6雷达测距的发展趋势1概述汽车防碰撞技术首先需要解决的问题是汽车之间的安全距离。汽车与汽车之间的距离小于安全距离,就应该能够自动报警,并采取制动措施。目前,测定汽车之间安全距离的方法有三种:超声波测距、毫米波雷达测距和激光测距,防撞雷达系统装配在车辆的前方、侧方或者后方,完成前视防撞(防追尾碰撞)、侧视防撞(防更换车道时两车相撞)和后视防撞(防倒车时与车后阻碍物相撞)等侧重点各异的功能。主要功能:防撞预警,辅助停车,盲点探测等,为完成上述功能所应达到的技术要求是系统应具有测距、测速、测角的功能。下图为奔驰车距监控防撞系统,可以在车辆停车和倒车时检测车辆前、后、侧面的障碍物距离,在靠近障碍物时会发出声音警报。2雷达测距控制系统的组成4.汽车控制装置:即控制汽车的自动操作系统,达到自动减速慢速行车,或紧急刹车。通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡航的车速5.报警系统:安装在驾驶室前部,精确显示前方障碍物的距离值,面板上的数字键,可根据实际情况设定保京距离值,还有特殊输出接口,当系统报警时,该接口会输出TTL电平,可用于自动刹车开发3.雷达测距的基本原理工作原理:在车辆行驶中,雷达窄波束向前发射电磁波信号,当发射信号遇到目标时,被反射回来被同一天线接收,经混频放大处理,可用其差拍信号间来表示雷达与目标的距离,再根据差频信号相差与相对速度关系,计算出目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字模型后,既可算出危险时间,当危险程度达到各种不同等级时,分别输出报警信号或通过车辆控制电路去控制车速或刹车。当距离过近时,有些车型警告喇叭会响起,以警告驾驶者注意前方障碍物已经接近车体,同时DTR电脑会通过车身电脑网络CAN-BAS与发动机ECU、变速器ECU及ESP(车辆稳定行驶系统)、ABS刹车系统ECU,通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡航的车速。若前方无障碍物(100米为限)则警告灯会熄灭,车子便会加速至预设的巡航速度装有避撞雷达的汽车上了高速公路以后,驾驶员启动车上的避撞雷达。雷达选定好跟随的汽车以后,被跟随的汽车就成了后面汽车的“目标车”,无论加速,减速,停车,启动,后面的汽车都会在瞬间之内知晓,如果前面的汽车行驶一段时间之后,不再适合于自己的“目标车”,驾驶员可以重新选择另一辆“目标车”。汽车防撞系统流程图图3.3脉冲雷达测距原理图信号的瞬时频率随时间线性变换,当前方有单目标回波时,发射信号和反射信号将进行混频,混频后得到的信号中含有目标的相对距离和相对速度的信息。现记f0作为发射信号中心频率,B为频带宽度,T为扫频周期,调制信号为三角波,c为光速,R和V分别为目标的相对距离和相对速度。在发射信号的上升段和下降段,中频输出信号可以表示为:存在的问题问题二一般所说的雷达为一次雷达,通过目标的二次散射功率来发现目标。二次散射功率取决于目标接收到的功率和目标的雷达截面积。由于雷达截面积与目标的材质(导电性能)、几何形状、尺寸、雷达波束的照射方向以及载波频率等诸多因素有关,不确定性太大,要求雷达接收机有很大的动态范围。而且,二次散射功率向全空间辐射,返回雷达接收天线的功率只占很小一部分,回波功率太弱会降低雷达作用距离。改进策略:采用双机应答式测距甲机所完成的功能与一次雷达相同,向目标车辆发射信号、接收信号,然后计算车距。乙机位于目标车辆的尾部,其接收甲机发射来的频率为F1的信号,经放大,变换到频率F2后再回发给甲机,对信号进行透明转发。(甲机发射频率即为乙机接收频率,甲机接收频率即为乙机发射频率,系统工作原理为:当安装了本雷达的两车在同一条公路上同向而行时,后向行车的甲机产生雷达脉冲,经中频调制后上变频到射频F1发射向前向行车的乙机;乙机先对接收到的信号进行放大,然后再变换到频率F2转发回后向行车的甲机;甲机对接收到的信号下变频、放大、检波和模数转换(A/D)后通过一定的数字信号处理算法增强回波信号的信噪比,再经数模转换(D/A)再生脉冲,从而得到两机之间的距离脉冲,最后把测得的距离用数码管、表头和光柱显示出来,前两种方式显示距离的准确读数,后一种方式反映距离的远近变化过程。4.雷达测距的性能指标5.几种常见的雷达测距5.1毫米波雷达测距防撞雷达,防止汽车追尾雷达向空间发射一定重复周期高脉冲,当遇到目标,目标反射回来的反射波将滞后与发射高频脉冲一个时间差Tr和一个频移(多谱勒频移)Fa,根据雷达可以测出这个数据,就可以依据以下公式断定目标位置:R=1/2C*Tr;R-目标到雷达的距离;Fa=2Vr/