如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
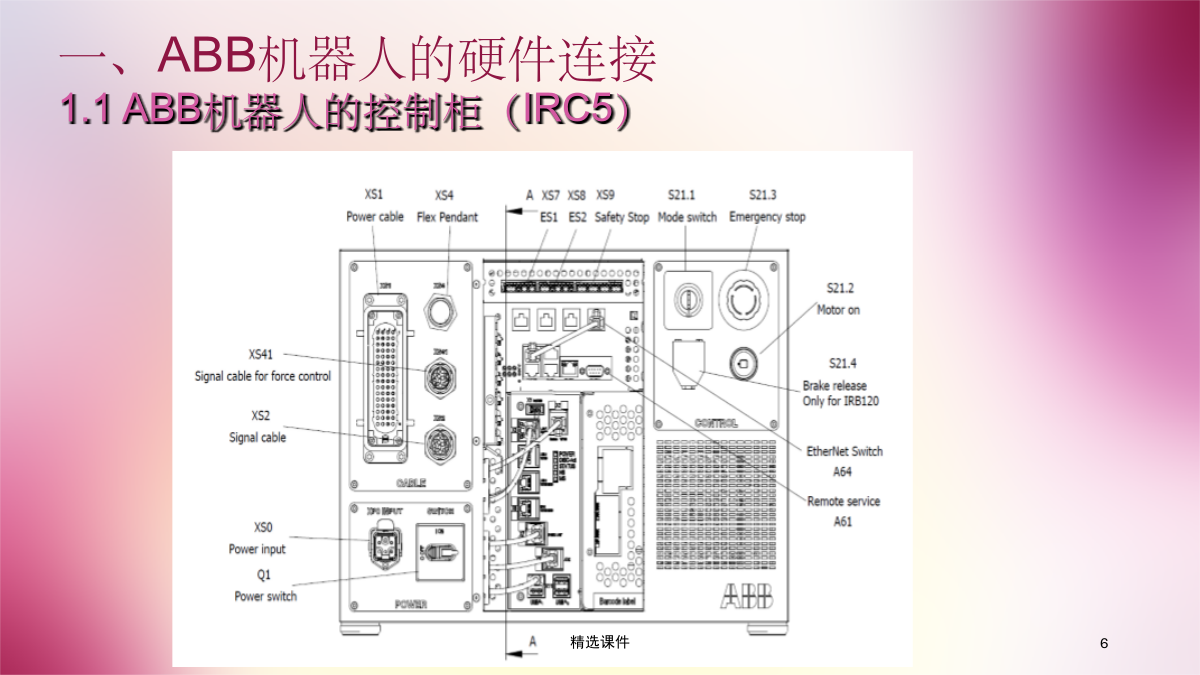
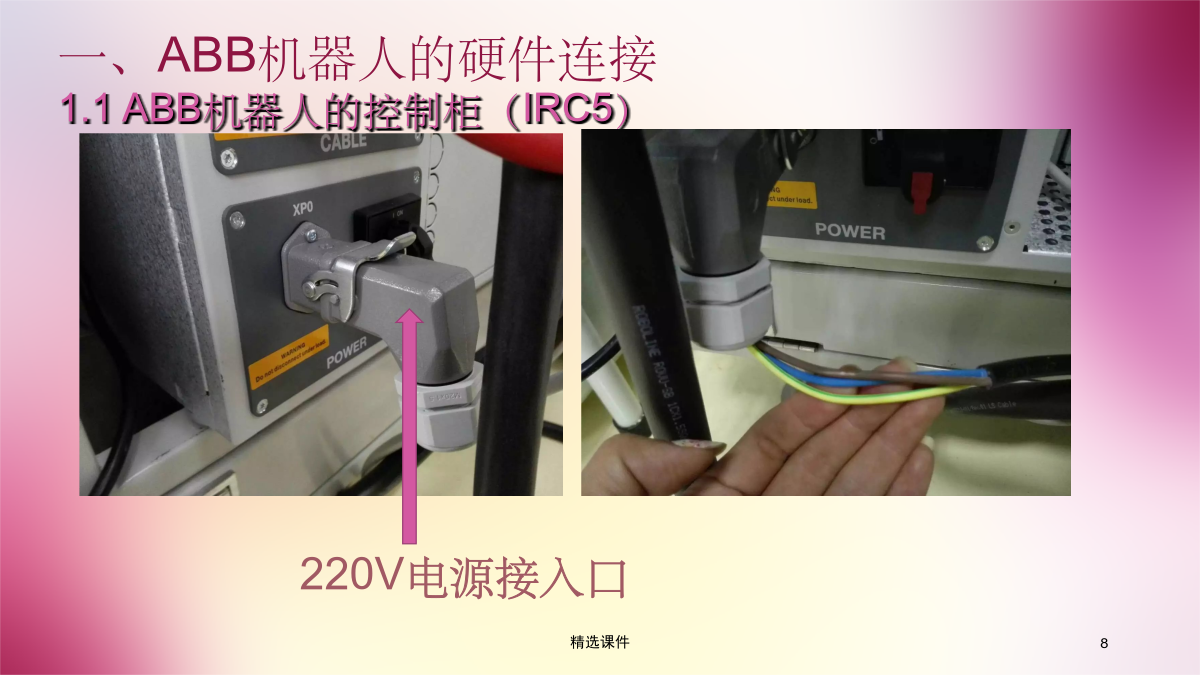
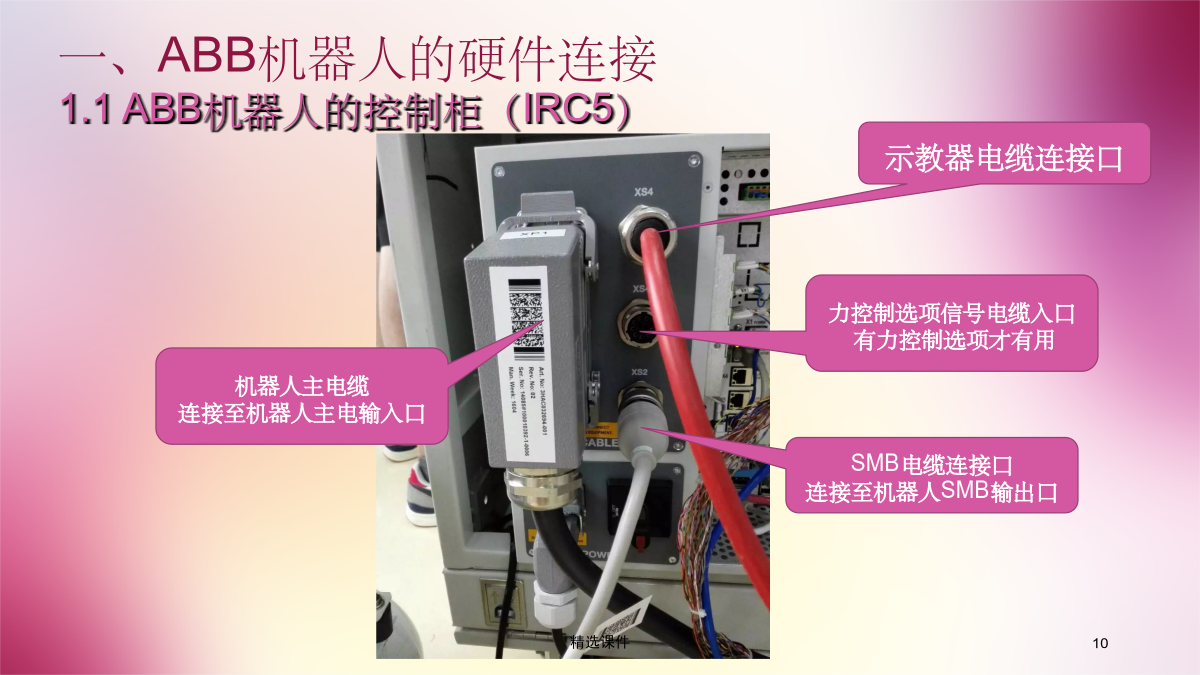
ABB机器人的硬件连接和I/O通信一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)一、ABB机器人的硬件连接1.1ABB机器人的控制柜(IRC5)机器人本体与控制柜之间的连接主要是电动机动力电缆与转数计数器电缆、用户电缆的连接。二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站二、在仿真软件RobotStudio中创建一个基本的工作站三、ABB机器人I/O通信的种类四、常用ABB标准I/O板的说明数字输出输入板(DSQC652)介绍四、常用ABB标准I/O板的说明五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接五、定义DSQC652板的总线连接六、定义数字输入信号di1六、定义数字输入信号di1六、定义数字输入信号di1六、定义数字输入信号di1六、定义数字输入信号di1七、定义数字输出信号di1目的1、将数字输入信号与系统的控制信号关联起来,就可以对系统进行控制(例如电动机开启、程序启动等)。2、系统的状态信号也可以与数字输出信号关联起来,将系统的状态输出给外围设备,以作控制之用。八、系统输入输出与I/O信号的关联八、系统输入输出与I/O信号的关联八、系统输入输出与I/O信号的关联八、系统输入输出与I/O信号的关联八、系统输入输出与I/O信号的关联八、系统输入输出与I/O信号的关联九、示教器可编程按键的使用九、示教器可编程按键的使用九、示教器可编程按键的使用十、I/O信号监控与操作十、I/O信号监控与操作66