如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
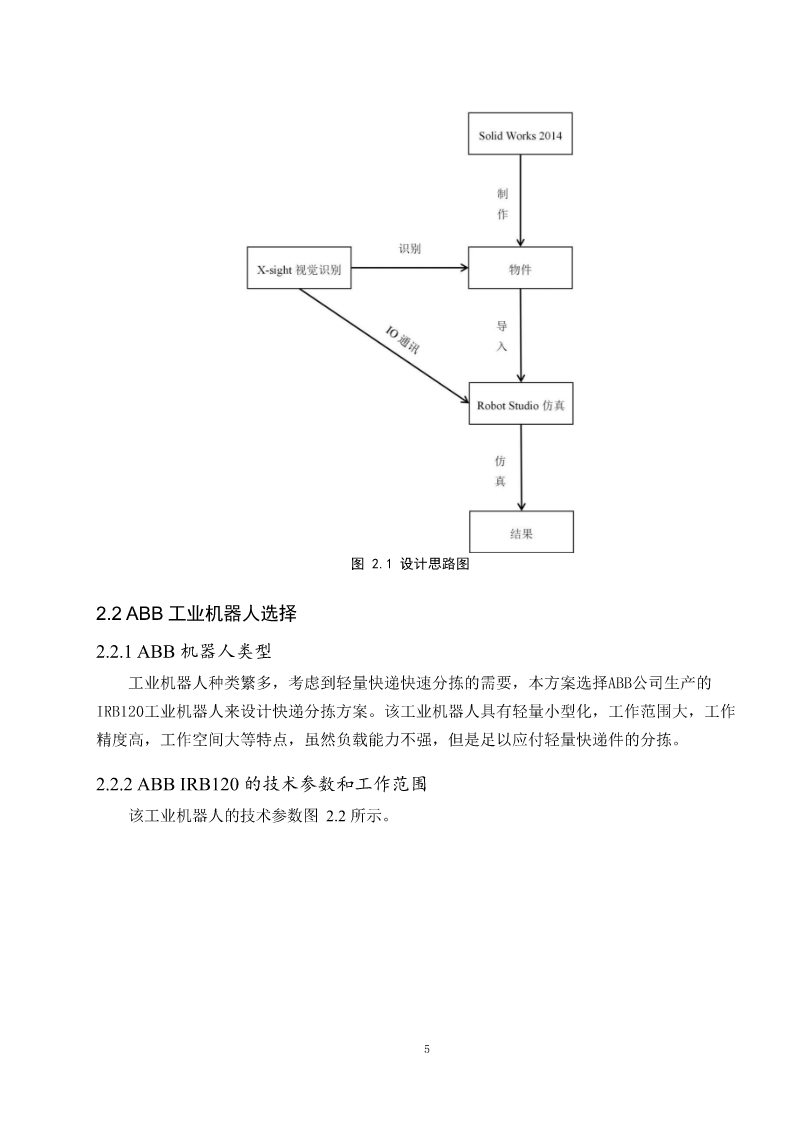
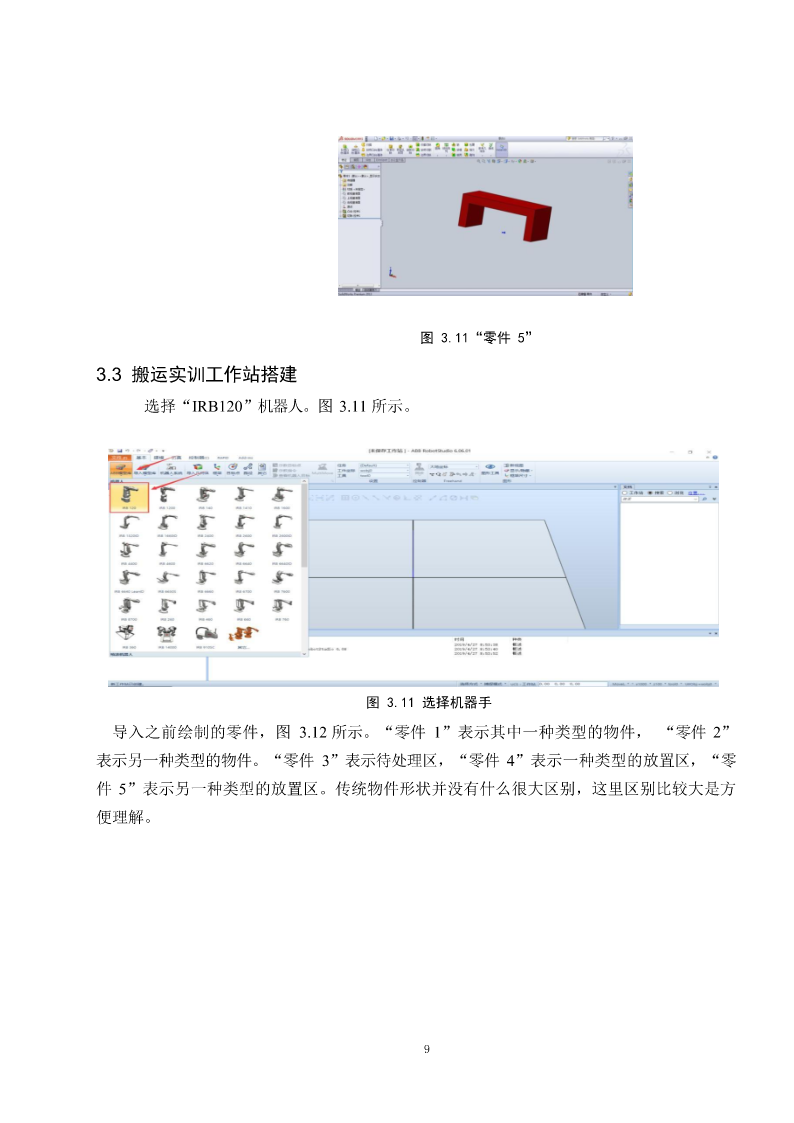
摘要本次方案设计主要的目的是为了快件行业提高效率,减少不必要的劳动力浪费现象。这次制作仿真模件都是通过SolidWorks2014来制作的,本设计基于工业机器人在RobotStudio中搭建了一种快递分拣仿真工作站,通过对工作站布局和配置,以及对工业机器人进行编程和调试,最终实现了一种快递分拣方案的仿真演示。关键词:ABB工业机器人;SolidWorks2014;分拣目录1.现状及意义...............................................................................................................12.设计思路以及机器人的选择...................................................................................22.1设计思路图.....................................................................................................22.2ABB工业机器人选择.....................................................................................32.2.1ABB机器人类型..................................................................................32.2.2ABBIRB120的技术参数和工作范围................................................33.建模、工作站仿真...................................................................................................43.1使用SolidWorks2014建模..........................................................................43.3搬运实训工作站搭建.....................................................................................63.4动态搬运工具创建.........................................................................................83.4.1工具属性设定......................................................................................83.4.2检测传感器创建..................................................................................93.4.3拾取释放动作设定............................................................................103.4.4属性与连接设置、添加I/O信号和连接.........................................113.4.5搬运路径创建与I/O指令添加.........................................................113.5工作站运行效果...........................................................................................124.结论.........................................................................................................................14参考文献.........................................................................................................