如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
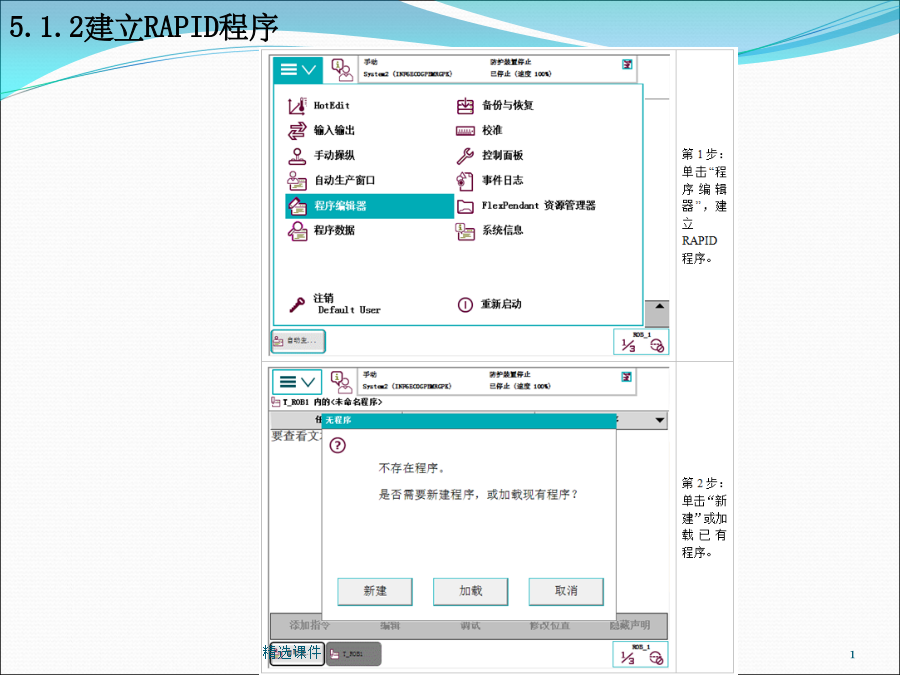
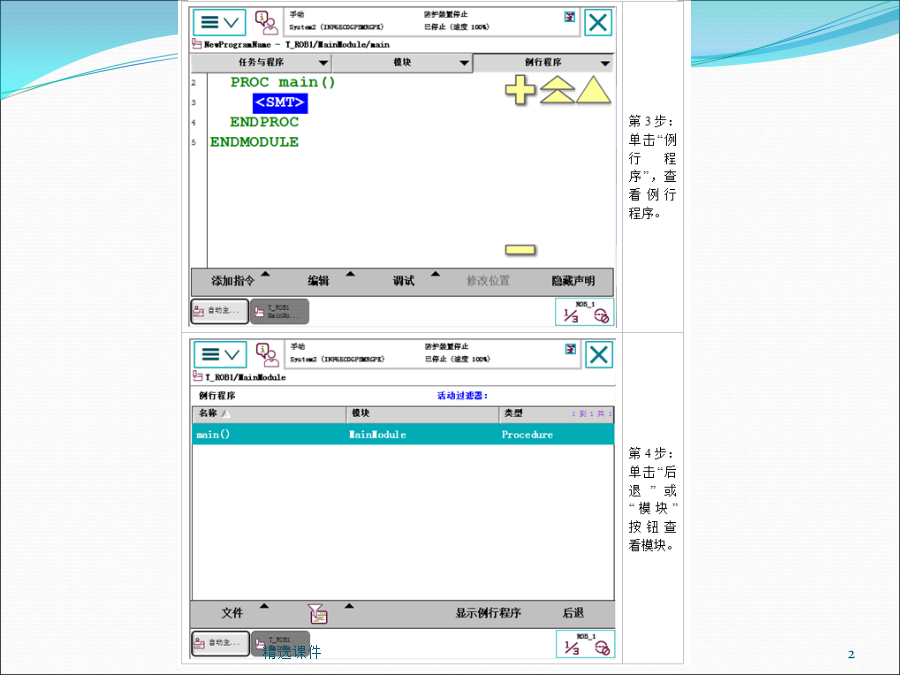
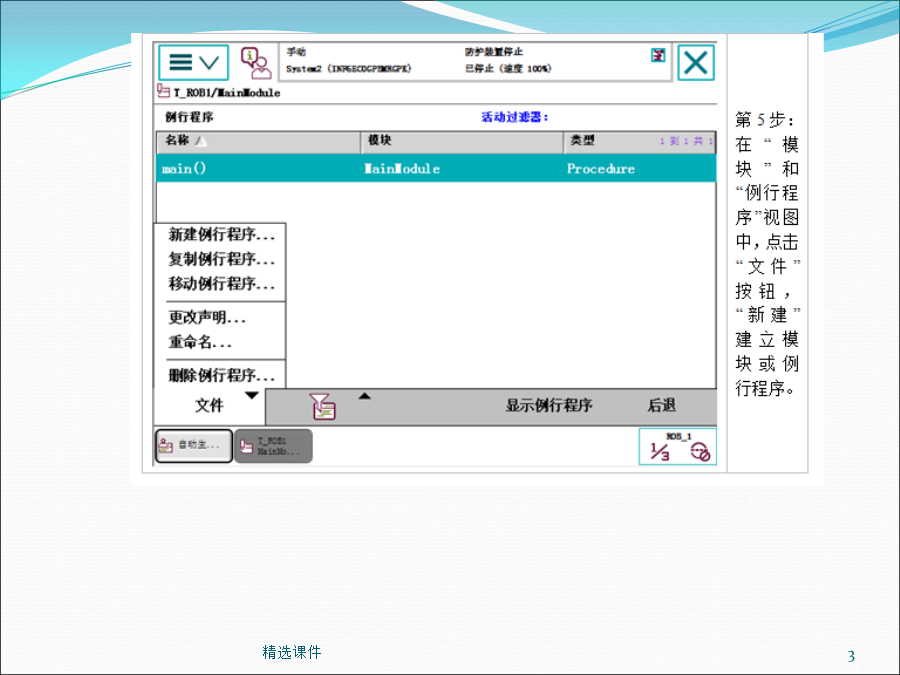
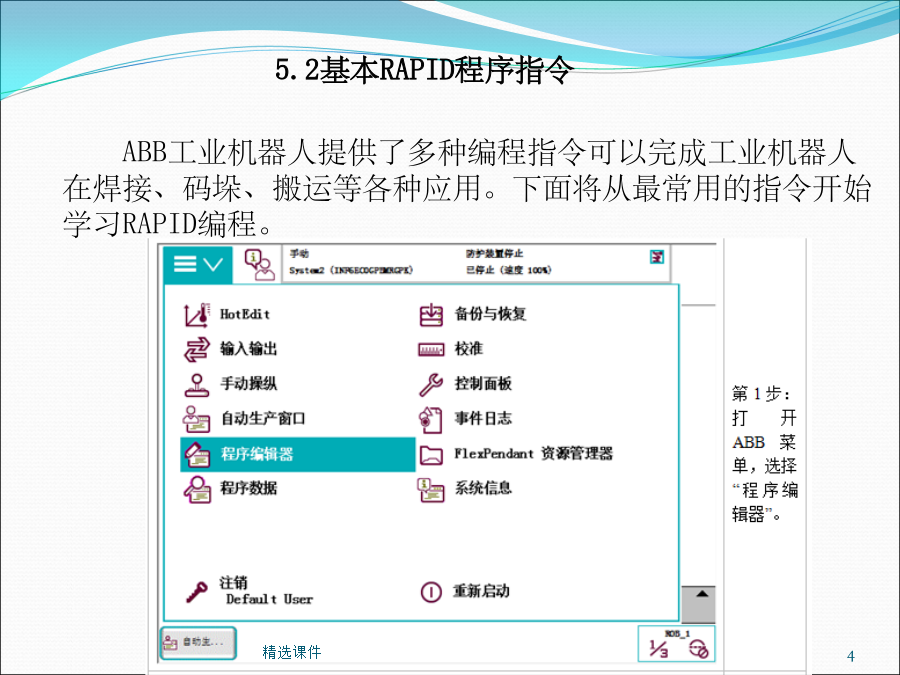
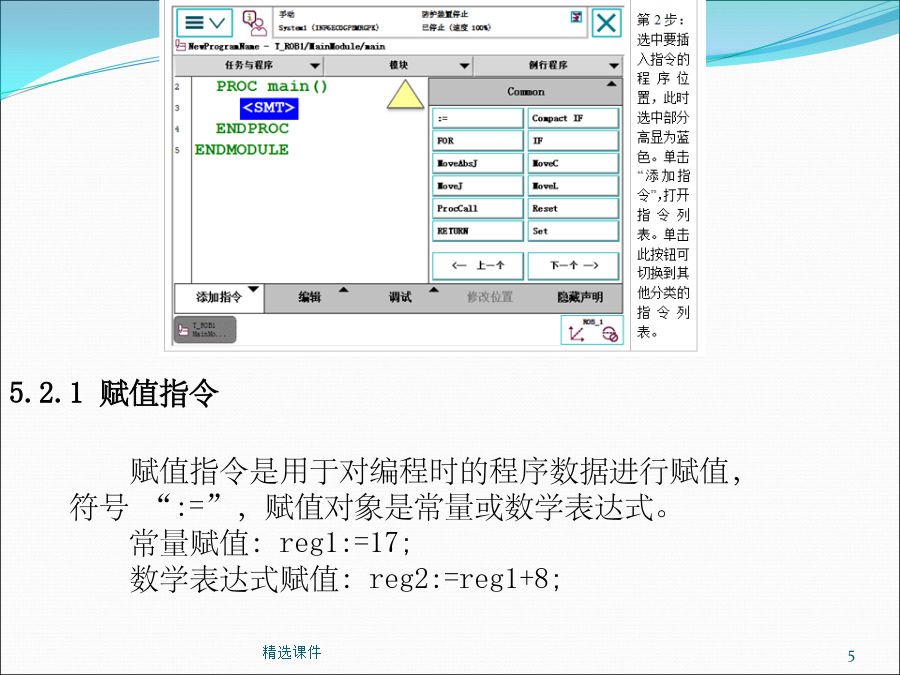
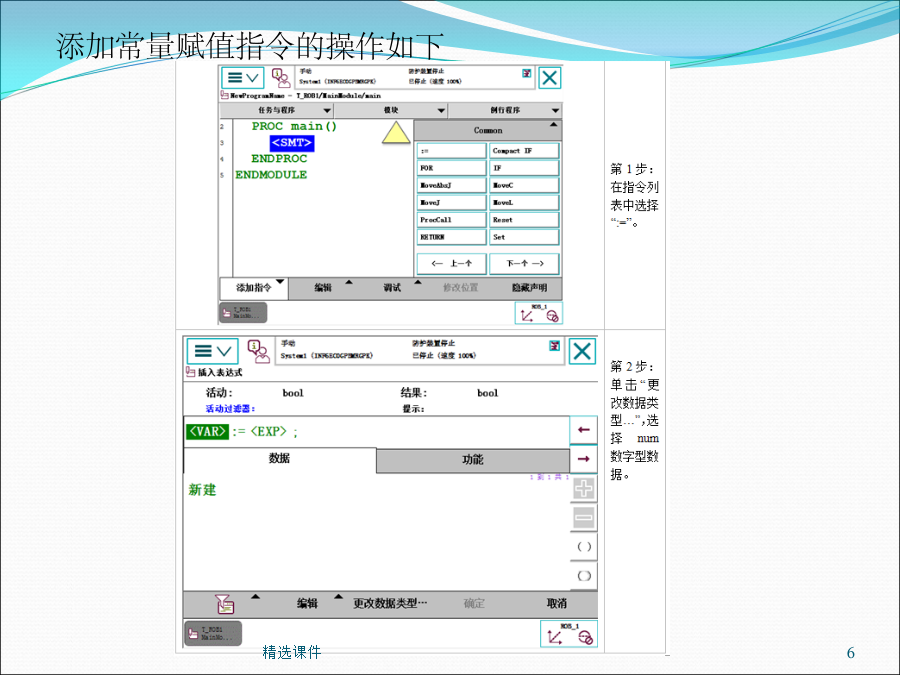
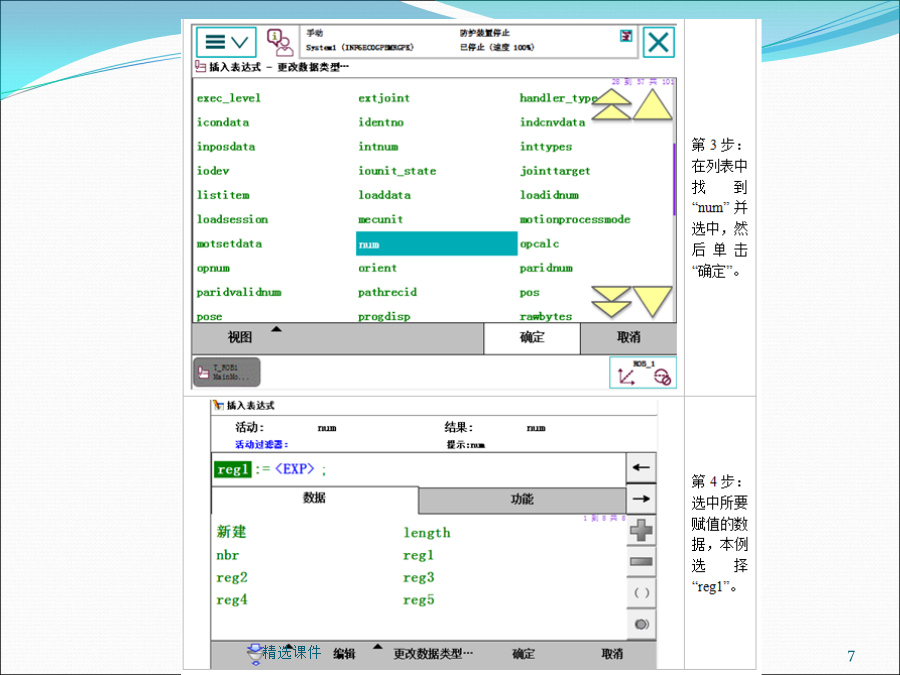
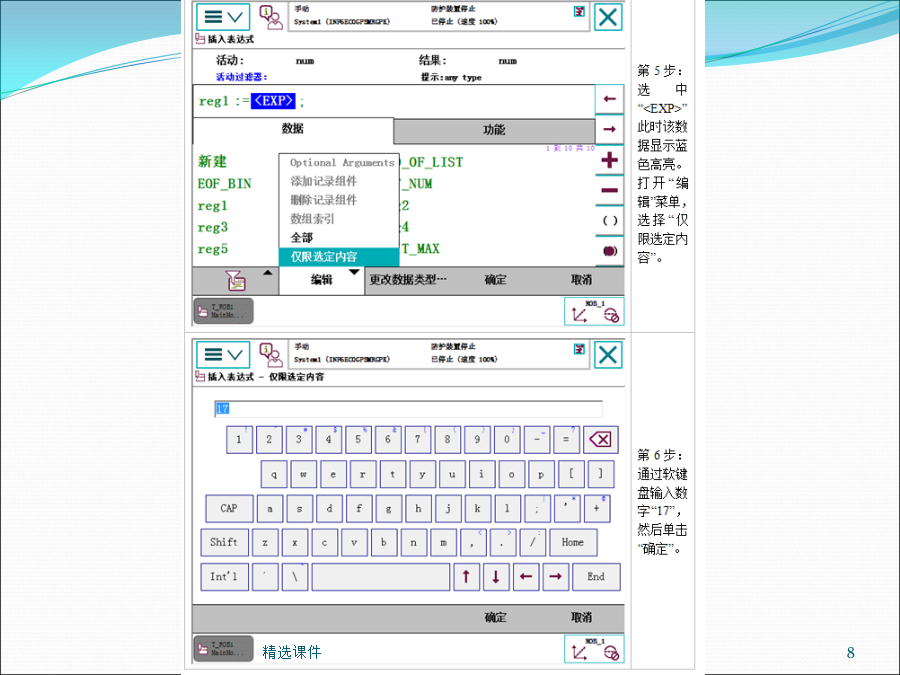
5.1.2建立RAPID程序235.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下789(2)添加带数学表达式的赋值指令的操作111213145.2.2工业机器人常用运动指令16171819MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用于圆弧的曲率,第三个点是圆弧的终点5.2.3运动指令的使用示例运动速度一般最高为50000mm/s,在手动限速状态下,所有的运动速度被限速在250mm/s。fine指机器人TCP达到目标点,在目标点速度降为零。工业机器人动作有所停顿然后再向下运动,如果是一段路径的最后一个点,一定要为fine。转弯区数值越大,机器人的动作路径就越圆滑与流畅。5.2.4I/O控制指令3.WaitDI数字输入信号判断指令WaitDI数字输入信号判断指令用于判断数字输入信号的值是否与目标一致,di1数字输入信号。WaitDIdi1,1;程序执行此指令时,等待di1的值为1。如果di1为1,则程序继续往下执行;如果到达最大等待时间300s(此时间可根据实际进行设定)以后,di1的值还不为1,则机器人报警或进入出错处理程序。4.WaitDO数字输出信号判断指令WaitDO数字输出信号判断指令用于判断数字输出信号的值是否与目标一致。WaitDOdo1,1;参数以及说明同WaitDi指令。5.WaitUntil信号判断指令WaitUntil信号判断指令可用于布尔量、数字量和I/O信号值的判断,如果条件到达指令中的设定值,程序继续往下执行,否则就一直等待,除非设定了最大等待时间。flag1为布尔量型数据,num1数字型数据。WaitUntildi1=1;WaitUntildo1=0;WaitUntilflag=TRUE;WaitUntilnum1=8;2.IF条件判断指令IF条件判断指令,就是根据不同的条件去执行不同的指令。指令解析:IFnum1=1THENflag:=TRUE;ELSEIFnum1=2THENflag1:=FALSE;ELSESetdo1;ENDIF如果num1为1,则flag1会赋值为TRUE。如果num1为2,则flag1会赋值为FALSE。除了以上两种条件之外,则执行do1置位为1。条件判定的条件数量可以根据实际情况进行增加与减少。3.FOR重复执行判断指令FOR重复执行判断指令,是用于一个或多个指令需要重复执行次数的情况FORiFROM1TO6DORoutine1;ENDFOR例行程序Routine1,重复执行6次。4.WHILE条件判断指令WHILE条件判断指令,用于在给定条件满足的情况下,一直重复执行对应的指令。WHILEnum1>num2DOnum1:=num1-1;ENDWHILE当num1>num2的条件满足的情况下,就一直执行num1:=num1-1的操作。5.2.6其他的常用指令2.RETURN返回例行程序指令RETURN返回例行程序指令,当此指令被执行时,则马上结束本例行程序的执行,返回程序指针到调用此例行程序的位置。当di1=1时,执行RETURN指令,程序指针返回到调用Routine2的位置并继续向下执行Setdo1这个指令。3.WaitTime时间等待指令WaitTime时间等待指令,用于程序在等待一个指定的时间以后,再继续向下执行WaitTime4;Resetdo1;等待4s以后,程序向下执行Resetdo1指令。5.3建立一个可运行的基本RAPID程序1.建立RAPID程序实例(事前准备建立board10和di1)363738394041424344454647484950512.对RAPID程序进行调试——pHome53543.对RAPID程序进行调试——rMoveRoutine564.对RAPID程序进行调试——main主程序5.RAPID程序自动运行的操作59606.RAPID程序模块的保存625.4RAPID编程详解功能Offs的作用是基于目标点在XYZ方向的偏移。如:“P40:=OFFS(P30,150,230,300)”是指p40相对于p30点在X方向偏移150mm,Y方向偏移230mm,Z方向偏移300mm。Offs操作步骤如下:65665.4.2中断程序686970717273747576程序举例PROCmain()rIniAll;WHILETRUEDOMo