如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
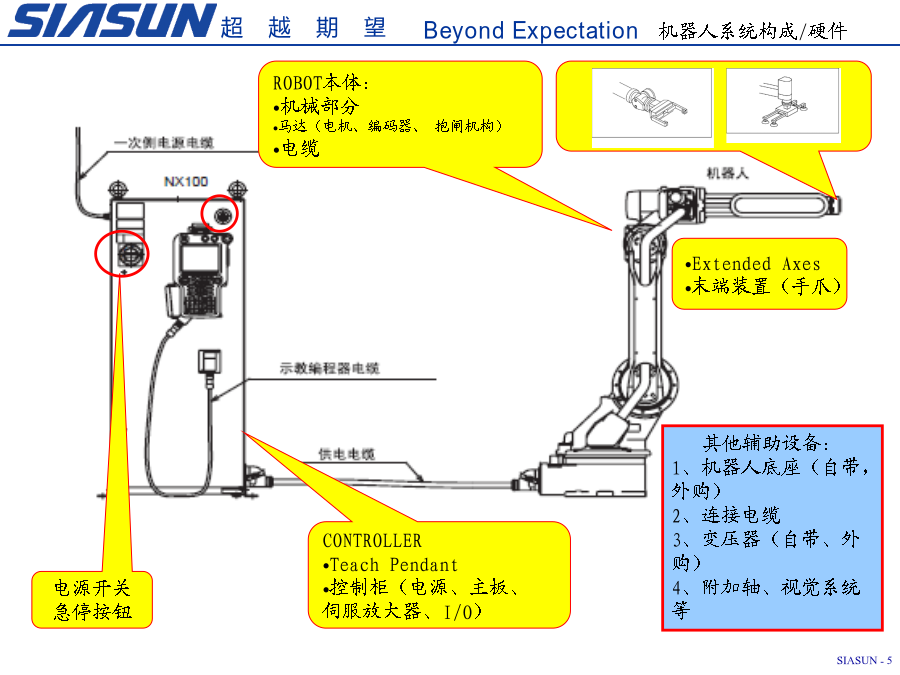
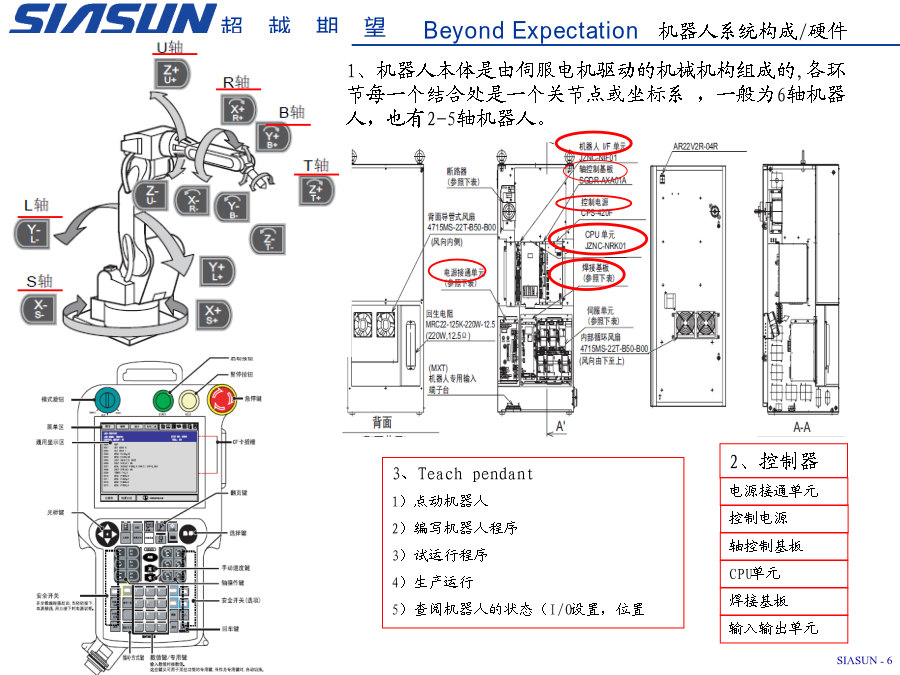
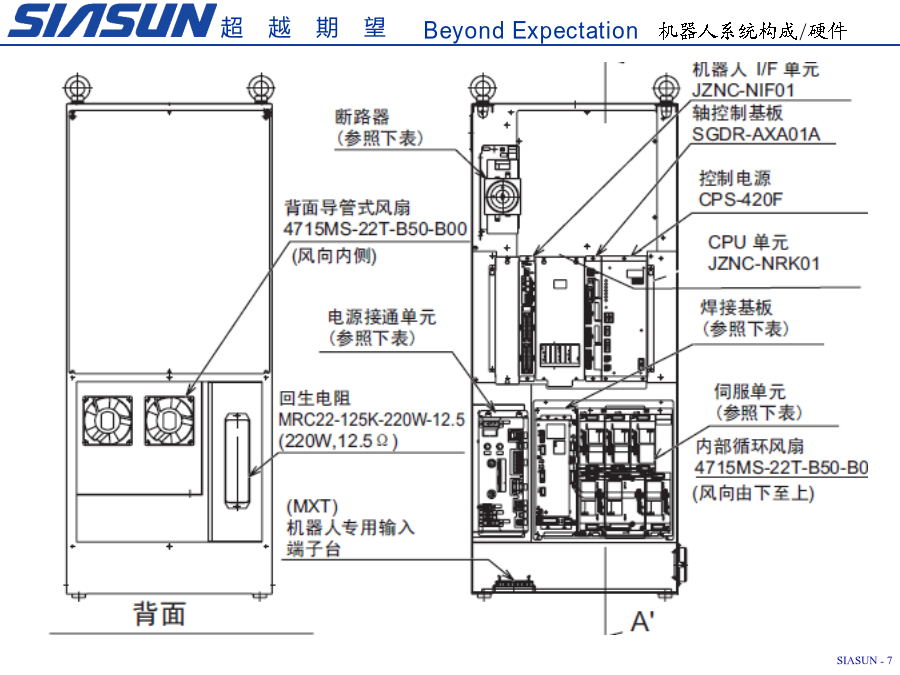
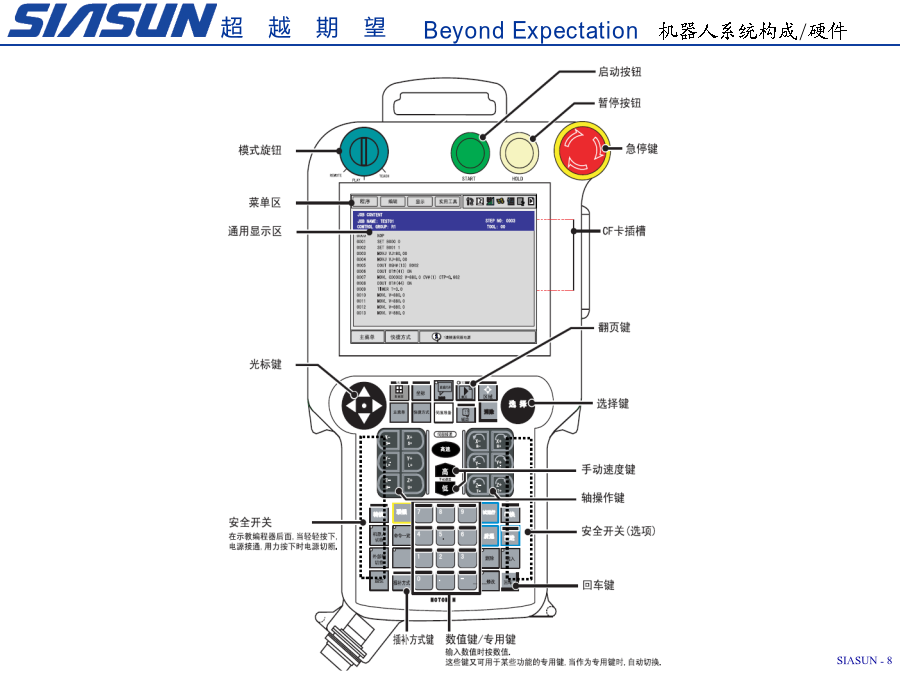
目录自从20世纪60年代初人类创造了第一台工业机器人以后,机器人就显示出它极大的生命力,在短短40多年的时间中,机器人技术得到了迅速的发展,工业机器人已在工业发达国家的生产中得到了广泛的应用。目前,工业机器人已广泛应用于汽车及汽车零部件制造业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、木材与家具制造业等领域中。在工业生产中,弧焊机器人、点焊机器人、分配机器人、装配机器人、喷漆机器人及搬运机器人等工业机器人都已被大量采用。随着科学与技术的发展,工业机器人的应用领域也不断扩大。目前,工业机器人不仅应用于传统制造业如采矿、冶金、石油、化学、船舶等领域,同时也已开始扩大到核能、航空、航天、医药、生化等高科技领域以及家庭清洁、医疗康复等服务业领域中。如,水下机器人、抛光机器人、打毛刺机器人、擦玻璃机器人、高压线作业机器人、服装裁剪机器人、制衣机器人、管道机器人等特种机器人以及扫雷机器人、作战机器人、侦察机器人、哨兵机器人、排雷机器人、布雷机器人等军用机器人都广泛应用于各行各业。而且,随着人类生活水平的提高及文化生活的日益丰富多彩,未来各种专业服务机器人和家庭用消费机器人将不断贴近人类生活,其市场将繁荣兴旺。机器人介绍全球主要机器人介绍:ROBOT本体:机械部分马达(电机、编码器、抱闸机构)电缆机器人系统构成/硬件机器人系统构成/硬件机器人的软件构成主要有两方面:ArcweldingRobot机器人坐标系WorldFrame(通用坐标系)示教机器人示教机器人机器人指令介绍二、特殊应用指令机器人的程序结构用户变量数据形式局部变量与用户变量有以下四点不同:•只能在一个程序中使用对于用户变量而言,可在多个程序中定义或使用一个变量;而局部变量只能在定义了局部变量的程序中使用,不能从其他程序读写。而且,因为局部变量不对其他程序造成影响,所以,以LB001局部变量为例,可以分别在多个程序中定义并使用。三、与外部设备信号交换方式:原点一、文件的输入/输出设备