如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
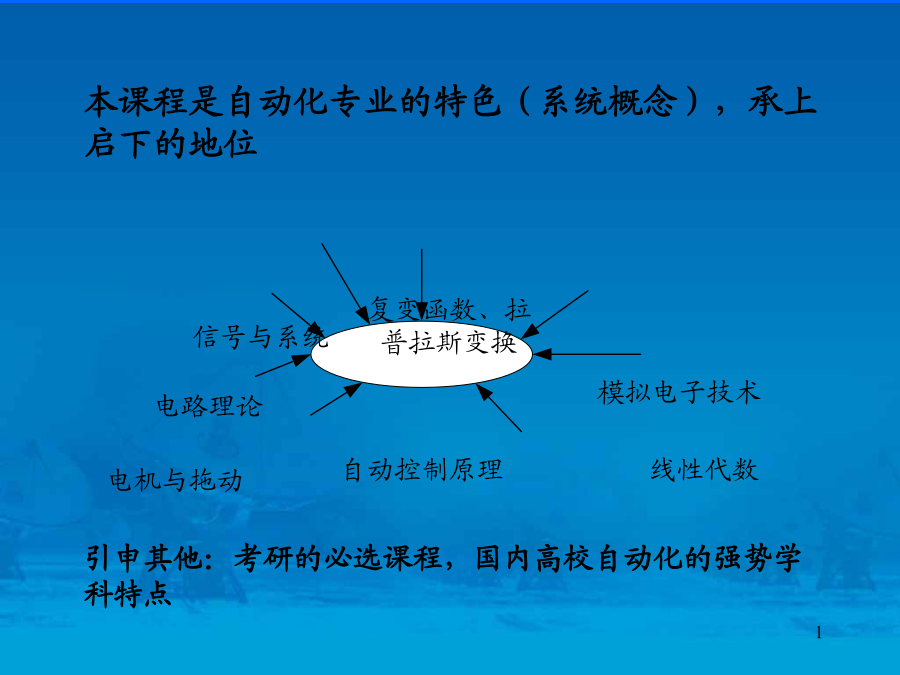
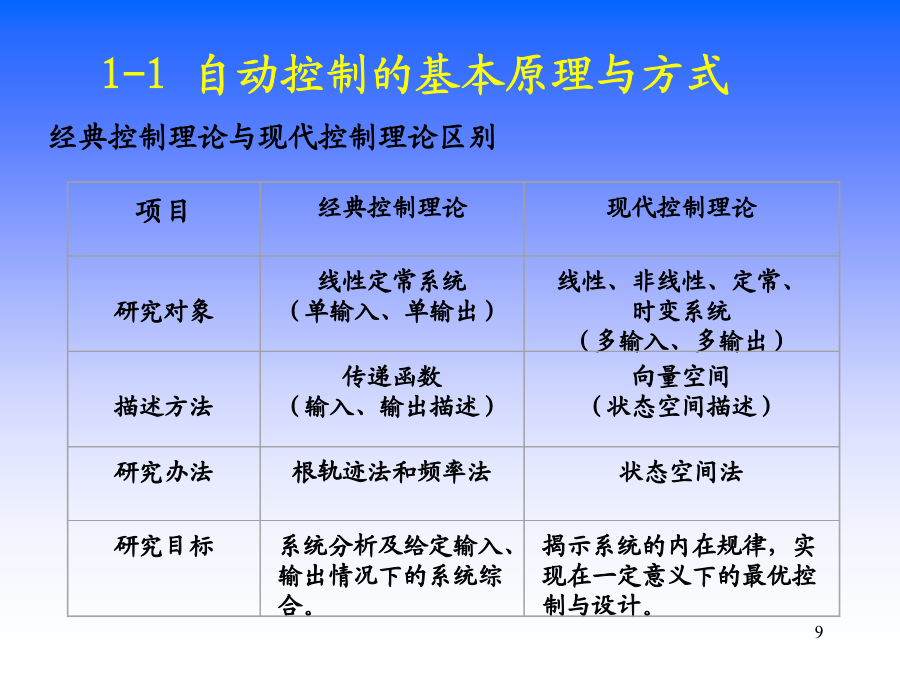
本课程是自动化专业的特色(系统概念),承上启下的地位第一章自动控制的一般概念1-1自动控制的基本原理与方式汽车自动焊接生产线1-1自动控制的基本原理与方式1-1自动控制的基本原理与方式(2)第二阶段。时间为本世纪60~70年代,称为“现代控制理论”时期。这个时期,由于计算机的飞速发展,推动了空间技术的发展。经典控制理论中的高阶常微分方程可转化为一阶微分方程组,用以描述系统的动态过程,即所谓状态空间法。这种方法可以解决多输入多输出问题,系统既可以是线性的、定常的,也可以是非线性的、时变的。这一时期的主要代表人物有庞特里亚金、贝尔曼(Bellman),及卡尔曼(R.E.Kalman,1930~)等人。庞特里亚金于1961年发表了极大值原理;贝尔曼在1957年提出了动态规划原则;1959年,卡尔曼和布西发表了关于线性滤波器和估计器的论文,即所谓著名的卡尔曼滤波(3)第三阶段。时间为本世纪70年代末至今。70年代末,控制理论向着“大系统理论”和“智能控制”方向发展。前者是控制理论在广度上的开拓,后者是控制理论在深度上的挖掘。“大系统理论”是用控制和信息的观点,研究各种大系统的结构方案、总体设计中的分解方法和协调等问题的技术基础理论。而“智能控制”是研究与模拟人类智能活动及其控制与信息传递过程的规律,研究具有某些仿人智能的工程控制与信息处理系统。项目1-1自动控制的基本原理与方式1-1自动控制的基本原理与方式1-1自动控制的基本原理与方式1-1自动控制的基本原理与方式2闭环控制系统(反馈控制系统)前向通道:系统输入量到输出量之间的通道。反馈通道:从输出量到反馈信号之间的通道。比较环节:输出量为各输入量的代数和。输入量:ur输出量:n反馈量:uf控制量:ua偏差量(ue)=给定量(ur)-反馈量(uf)闭环控制系统的特点:4.反馈控制系统的基本组成测量元件—用以测量被控的物理量,量并将其转换成与输入量同一物理量后,再反馈到输入端以作比较。如果这个物理量是非电量,一般转换为电量。给定元件—其职能是给出与期望的被控量相对应的系统输入量。比较元件—其职能是把测量元件检测的被控量实际值与给定元件给出的输入量进行比较,求出它们的偏差。放大元件—其职能是将比较元件给出的偏差信号进行放大,用来推动执行元件去控制被控对象。执行元件—其职能是直接推动被控对象,使其被控量发生变化。校正元件—也叫补偿元件,它是结构或参数便于调整的元部件,用串联或反馈的方式连接在系统中,以改善系统的性能。常用的名词术语5.自动控制系统的基本控制方式复合控制就是开环控制和闭环控制相结合的一种控制。实质上,它是在闭环控制回路的基础上,附加了一个输入信号或扰动作用的顺馈通路,来提高系统的控制精度。1-2自动控制系统示例给定装置1-3自动控制系统的分类1-3自动控制系统的分类1-3自动控制系统的分类2.线性定常离散控制系统离散系统是指系统的某处或多处的信号为脉冲序列或数码形式,因而信号在时间上是离散的。连续系统经过采样开关的采样就可以转换成离散信号。离散系统用差分方程描述。3、非线性控制系统系统中只要有一个元部件是非线性的,这类系统称为非线性系统。要用非线性微分(或差分)方程来描述其特征。1-4对自动控制系统的基本要求快速性由于系统的对象和元件通常具有一定的惯性,并受到能源功率的限制,因此,当系自输入(给定输入或扰动输入)信号改变时,在控制作用下,系统必然由原先的平衡状态经过一段时间才过渡到另一个新的平衡状态,这个过程称为过渡过程。过渡过程越短,表明系统的快速性越好。快速性是衡量系统质量高低的重要指标之一。准确性对一个稳定的系统而言,当过渡过程结束后,系统输出量的实际值与期望值之差称为稳态误差,它是衡量系统稳态精度的重要指标。稳态误差越小,表示系统的准确性越好。2.典型外作用1-4对自动控制系统的基本要求(3)单位脉冲函数1-4对自动控制系统的基本要求第二章控制系统的数学模型数学模型定义:控制系统的数学模型是描述系统内部物理量(或变量)之间关系的数学表达式。静态数学模型:在静态条件下(即变量各阶导数为零),描述变量之间关系的代数方程。动态数学模型:描述变量各阶导数之间关系的微分方程叫动态数学模型。第二章控制系统的数学模型2-1控制系统的时域数学模型(4)标准化,将与输入有关的各项放在等号右侧,与输出有关的各项放在等号左侧,并按降幂排列,最后将系数归一化为具有一定物理意义的形式;2-1控制系统的时域数学模型2-1控制系统的时域数学模型例2-2电枢控制式直流电动机原理图如图所示。试列写电枢控制式直流电动机的运动方程可由以下三部分组成:(3)电动机轴上的转矩平衡方程2-1控制系统的时域数学模型例2-3试列写下图所示的