如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
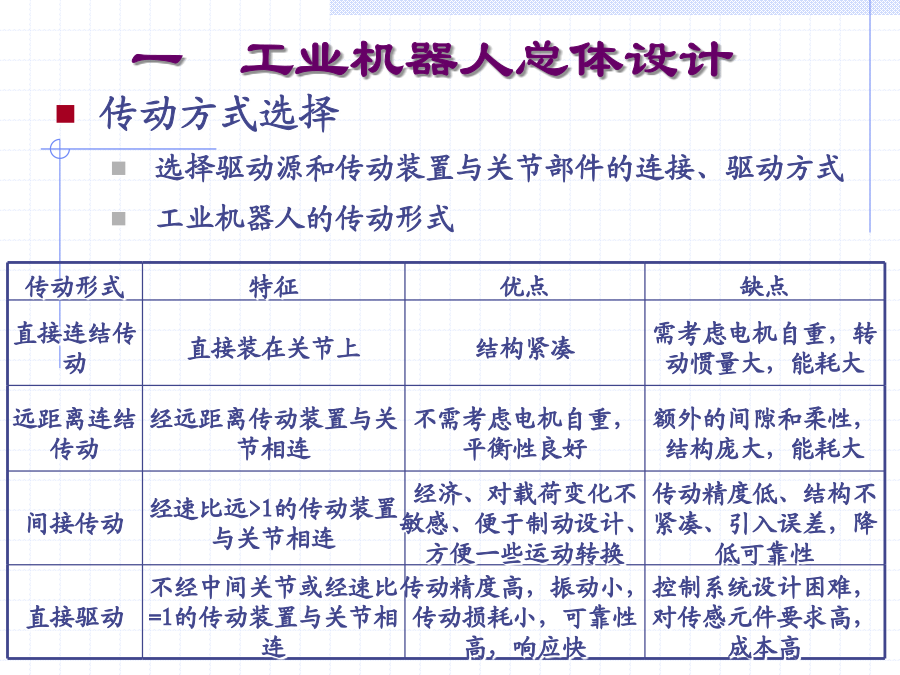
主要内容3、臂部设计臂部设计的基本要求手臂的常用结构臂部运动驱动力计算4、手腕设计概述手腕分类手腕设计举例一工业机器人总体设计一工业机器人总体设计一工业机器人总体设计一工业机器人总体设计一工业机器人总体设计二传动部件设计动压导轨:靠导轨之间的相对运动产生的压力油膜将运动件浮起,把两个导轨面隔离,形成纯液体摩檫,其工作原理与动压轴承相同,形成导轨面间压力油膜的条件是:两导轨面之间应有锲形间隙和一定的相对速度,此外还需要有一定粘度的润滑油流进锲形间隙适用于主运动导轨二传动部件设计二传动部件设计与一般齿轮传动和蜗杆传动不同,谐波传动其工作原理是基于一种变形原理,即通过柔轮变形时其径向位移和切向位移间的转换关系,从而实现传动机构的力和运动的转换。谐波齿轮传动是靠柔性齿轮(柔轮)所产生的可控弹性变形来实现传递运动和动力的。它的基本构件有:柔轮、波发生器和刚轮。三个构件中可任意固定一个,其余两个一为主动、一为从动,可实现减速或增速(固定传动比),也可变换成两个输入,一个输出,组成差动传动。当刚轮固定,波发生器为主动,柔轮为从动时,柔轮在椭圆凸轮作用下产生变形,在波发生器长轴两端处的柔轮轮齿与刚轮轮齿完全啮合;在短轴两端处的柔轮轮齿与刚轮轮齿完全脱开;在波发生器长轴与短轴区间,柔轮轮齿与刚轮轮齿有的处于半啮合状态,称为啮入;有的则逐渐退出啮合处于半脱开状态,称为啮出。由于波发生器的连续转动,使得啮入、完全啮合、啮出、完全脱开这四种情况依次变化,循环不已。由于柔轮比刚轮的齿数少2,所以当波发生器转动一周时,柔轮向相反方向转过两个齿的角度,从而实现了大的减速比。行星减速器的主要特点如下:(1)体积小、重量轻、结构紧凑、传递功率大、承载能力高。由于行星齿轮传动是一种共轴线式传动形式,即具有同轴线传动的特点。在结构上采用了对称分流传动结构,即用几个完全相同的行星轮均匀分布在中心轮圆周来共同分担载荷,并且合理地应用了内啮合,充分地利用了空间的容积,从而缩小了径、轴向尺寸,使结构紧凑,而承载能力又高。因而行星齿轮传动在相同功率和传动比的条件下,可使其外部尺寸和重量只为普通齿轮传动的1/2-1/6。(2)传动效率高,工作可靠。行星齿轮传动由于采用了对称的分流传动结构,使作用于中心轮和行星架等主要轴承上的作用力互相平衡,有利于提高传动效率。(3)传动比大。适当选择传动类型和齿轮齿数,便可利用少数几个齿轮而获得很大的传动比。由于行星齿轮传动具有上述优点,故目前行星齿轮减速器不仅适用于告诉大功率,而且在低速大扭矩设备上也已广泛应用。三臂部设计四手腕设计五手部设计手部设计和选用要求普通手爪设计六机身及行走机构设计垂直升降运动驱动力计算升降立柱下降不卡死条件计算