如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
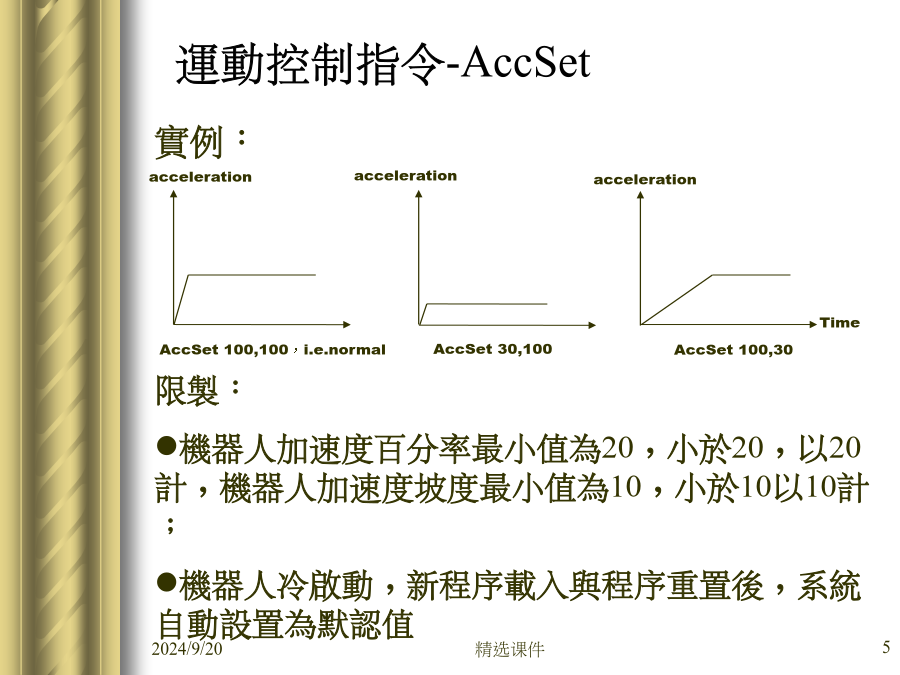
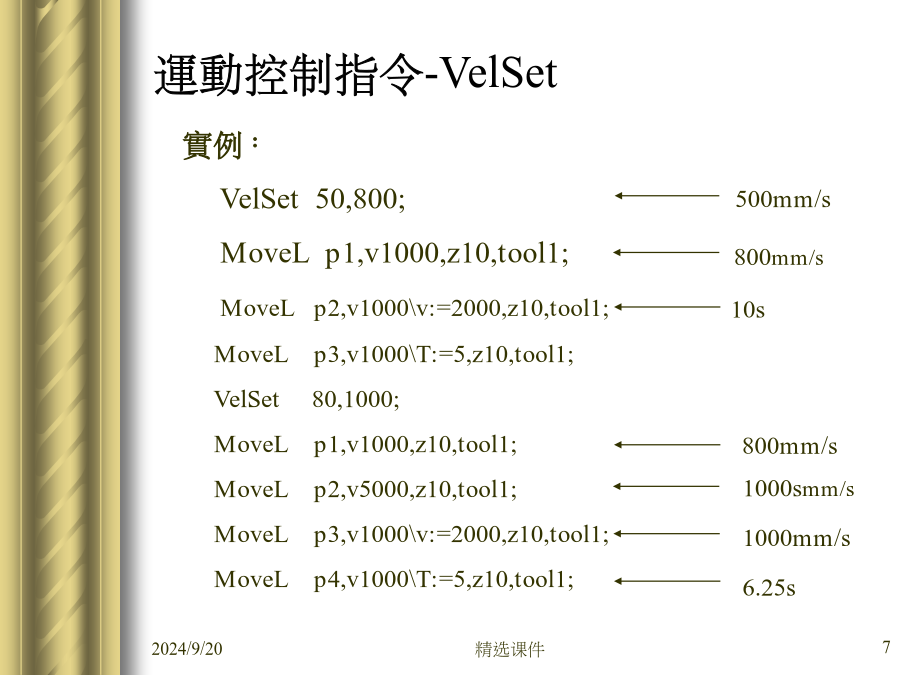
ABB機器人高級指令目錄運動控制指令運動控制指令-AccSet運動控制指令-AccSet運動控制指令-VelSet運動控制指令-VelSet運動控制指令-VelSet運動控制指令-ConfJ運動控制指令-ConfJ運動控制指令-ConfL運動控制指令-ConfL運動控制指令-SingArea運動控制指令-SingArea運動控制指令-SingArea運動控制指令-PathResol運動控制指令-PathResol運動控制指令-PathResol運動控制指令-SoftAct運動控制指令-SoftAct運動控制指令-SoftDeact外軸激活指令外軸激活指令-ActUnit外軸激活指令-ActUnit外軸激活指令-DeactUnit實例﹕MoveLp10,v100,fine,tool1;ActUnittrack_motion;MoveLp20,v100,z10,tool1;DeactUnittrack_motion;ActUnitorbit_a;MoveLp30,v100,z10,tool1;限製﹕不能在指令StorePath…RestorePath內使用不能在預置程序RESTART內使用計數指令計數指令-Add計數指令-Clear計數指令-Incr計數指令-Decr輸入輸出指令輸入輸出指令-AliasIO輸入輸出指令-AliasIO輸入輸出指令-AliasIO輸入輸出指令-InvertDO輸入輸出指令-InvertDO輸入輸出指令-IODisable實例﹕PROCgo_home()recover_flag:=1;IODisable“cell”,0’MoveJhome,v1000,fine,tool1;recover_cover:=2;IODisable“cell”,5;ERRORIFERRNO=ERR_IODISABLETHENIFrecover_flag=1THENTRYNEXT;ELSEIFrecover_flag=2THENRETRY;ENDIFELSEIFERRNO=ERR_EXCRPTYMAXTHENErrorWrite“IODisableerror”,”Restarttheprogram”;Ttop;ENDIFENDPROC輸入輸出指令-IODisable輸入輸出指令-IOEnable輸入輸出指令-IOEnable輸入輸出指令-IOEnable輸入輸出指令-PulseDO輸入輸出指令-PulseDO輸入輸出指令-PulseDO輸入輸出指令-Reset輸入輸出指令-Set輸入輸出指令-SetAo輸入輸出指令-SetAo輸入輸出指令-SetDo輸入輸出指令-SetGo輸入輸出指令-WaitDI輸入輸出指令-WaitDI實例﹕PROCPickPart()MoveJpPrePick,vFastEmpty,zBig,tool1;bTimeout:=TRUE;nCounter:=0;WHILEbTimeoutDOIFnCounter>3THENTPWrite“…..”;ENDIFIFnCounter>30THENStop;ENDIFWaitDIdi_Ready,1\MaxTime﹕=1\Timeflag:=bTimeout;IncrnCounter;ENDWHOLE…..ENDPROC輸入輸出指令-WaitDO實例﹕PROCGrip()Setdo03_Grip;WaitDOdo03_Grip,1;…..ENDPROCPROCGrip()Setdo03_Grip;WaitDOdo03_Grip,1\MaxTime:=5;…..ERRORIFERRNO=ERR_WAIT_MAXTIMETHENTRWrite“…..”;RETRY;ELSERAISE;ENDIFENDPROC實例﹕PROCGrip()Setdo03_Grip;bTimeout:=TRUE;nCounter:=0;WHILEbTimeoutDOIFnCounter>3THENTPWrite“…..”;ENDIFIFnCounter>30THENStop;ENDIFWaitDIdi_Ready,1\MaxTime﹕=1\Timeflag:=bTimeout;IncrnCounter;ENDWHOLE…..ENDPROC程序運行停止指令程序運行停止指令-Break程序運行停止指令-Break程序運行停止指令-EXITStop[\NoRegain];[\NoRegain]:路徑恢復參數(num)應用﹕機器人在當前指令停止運行﹐程序運行指針停留在下一行指令﹐可以用Start鍵繼續運行機器人﹐屬於臨時性停止﹐如果機器人停止