如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
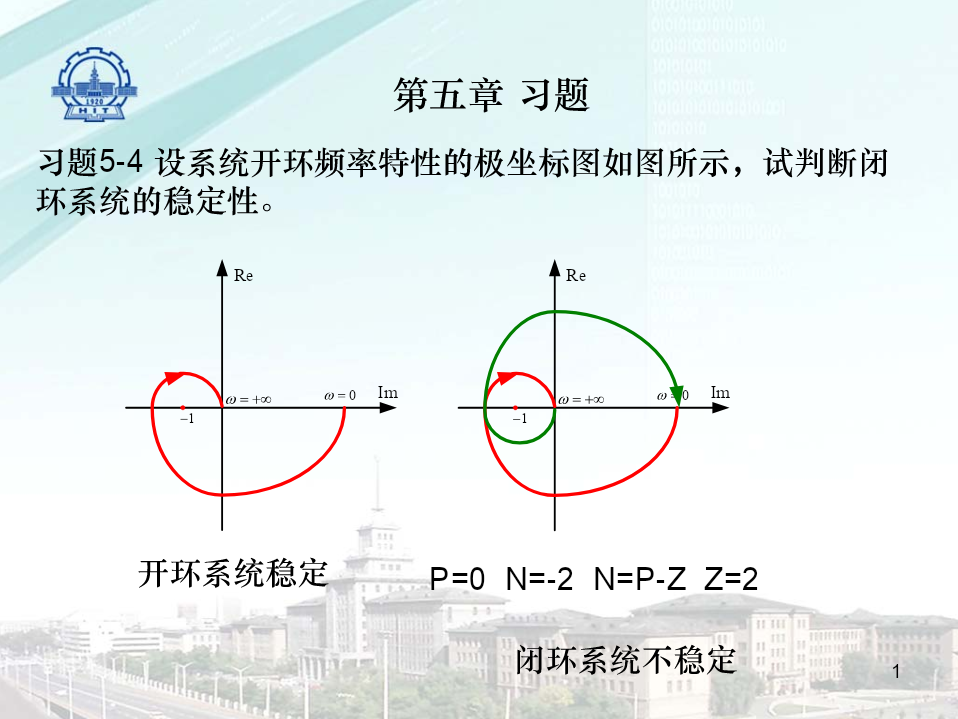
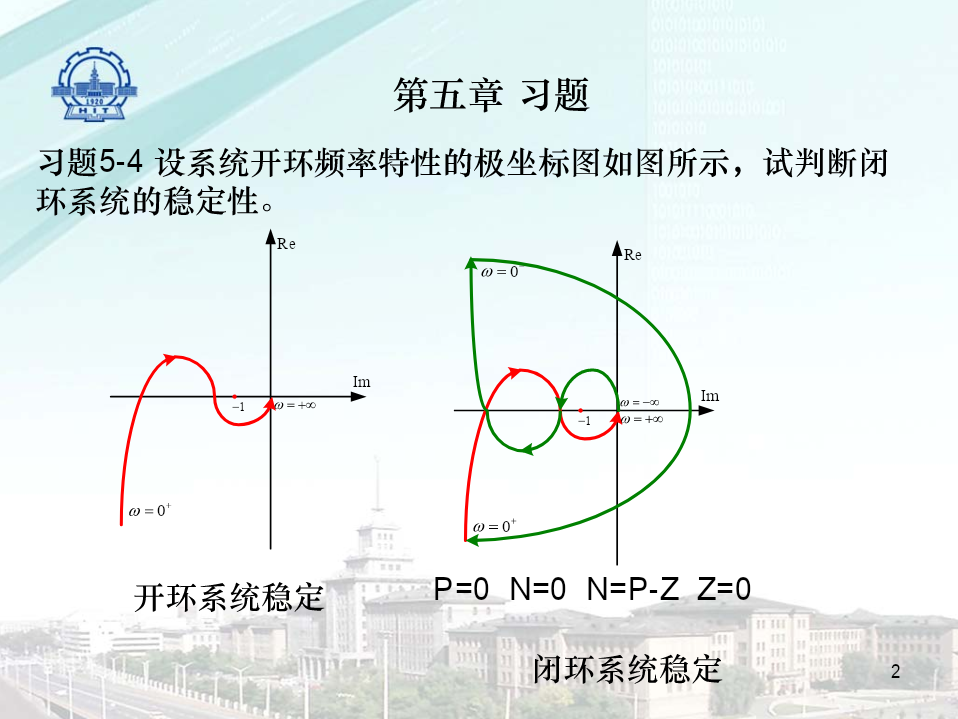
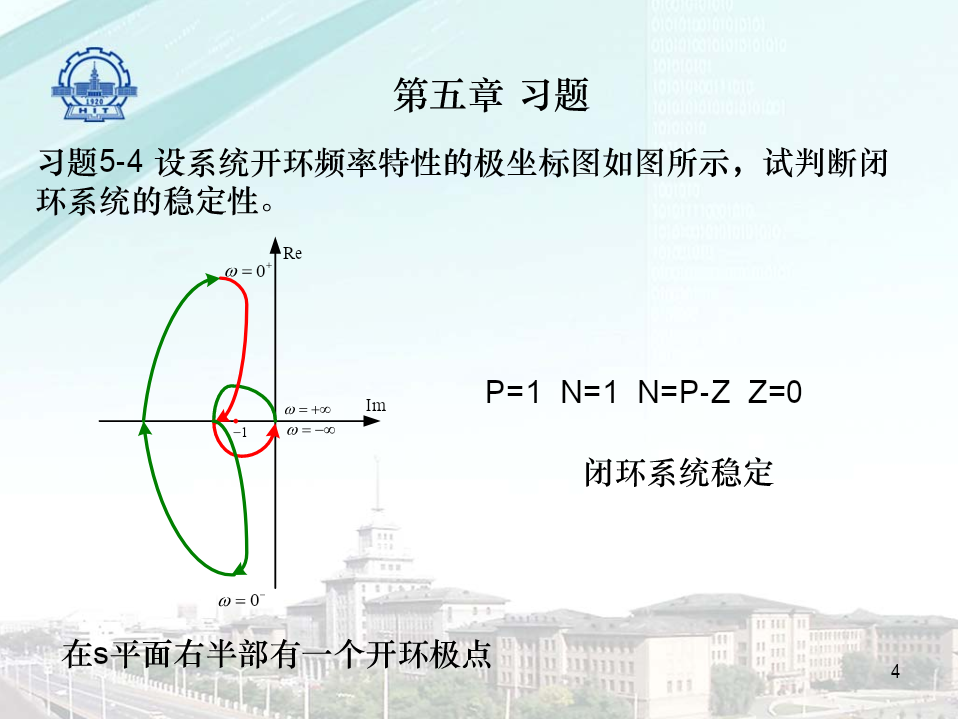
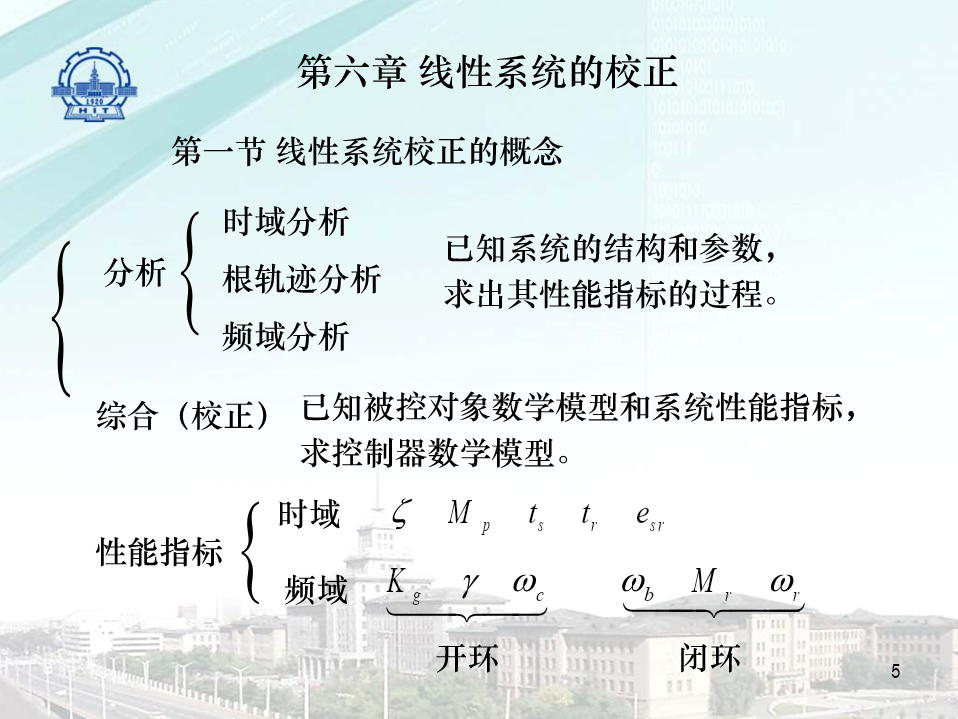
第五章习题习题5-4设系统开环频率特性的极坐标图如图所示,试判断闭环系统的稳定性。ReReω=+∞ω=0Imω=+∞ω=0Im−1−1开环系统稳定P=0N=-2N=P-ZZ=2闭环系统不稳定1第五章习题习题5-4设系统开环频率特性的极坐标图如图所示,试判断闭环系统的稳定性。ReReω=0−ImIm−1ω=+∞ω=−∞−1ω=+∞ω=0+ω=0+开环系统稳定P=0N=0N=P-ZZ=0闭环系统稳定2第五章习题习题5-4设系统开环频率特性的极坐标图如图所示,试判断闭环系统的稳定性。Reω=+∞ω=0Im−1开环系统稳定P=0N=0N=P-ZZ=0闭环系统稳定3第五章习题习题5-4设系统开环频率特性的极坐标图如图所示,试判断闭环系统的稳定性。Reω=0+P=1N=1N=P-ZZ=0ω=+∞Im−1ω=−∞闭环系统稳定ω=0−s在平面右半部有一个开环极点4第六章线性系统的校正第一节线性系统校正的概念时域分析已知系统的结构和参数,分析{根轨迹分析求出其性能指标的过程。频域分析综合(校正)已知被控对象数学模型和系统性能指标,求控制器数学模型。时域ζMpttesrsr性能指标{频域KMgcbrrγωωω142431442443开环闭环5第一节线性系统校正的概念•控制器的物理构成无源校正简单、省钱、可靠。按元件分有源校正}{数字校正超前校正——PD按性能分迟后校正——PI{迟后-超前校正——PIDP——比例,D——微分,I——积分。6第一节线性系统校正的概念•控制器的物理构成串联校正——在前向通道中按在系统中位置分{反馈校正——在反馈通道中(复杂、但抗干扰)R()sCs()Gs1()Gs0()Gsc()Hs()串联校正反馈校正7第一节线性系统校正的概念•校正的特点:1、试探性(结构、参数未完全确定);2、结果的非唯一性;3、图解法。8第二节常用校正装置及其特性一、相位超前校正网络sz−css+11ττ+Gsc()===αsp−+cs11ατατs+零点:zc=−1τ小零点大极点τ=R1C极点:pc=−1ατzR2α=c<1开环增益下降α倍α=<1RR1+2pcjωτ+1Gj()ω=取cjαωτ+19第二节常用校正装置及其特性jωτ+1Gj()ω=cjαωτ+1相角超前ϕc(ωτωατω)=−arctgarctg>01−ατω()dϕc()ωϕωc()=arctg=01+ατω22dω111⎛⎞⎛⎞ωm==⎜⎟⎜⋅⎟几何中心ατ⎝⎠⎝τατ⎠1−sinϕ11−α−αα=mϕϕωmcm==()arctg=arcsin2α1+α1+sinϕm10第二节常用校正装置及其特性jωτ+1Gj()ω=cjαωτ+1L()ω=+−+20lg1ωτ2220lg1αωτ222ω<<1τL()ω=01ω>>1ατL()ωωταωτ=−20lg20lg=20lgα11ωω==mLω=lg10)(ατmα超前网络相当于一个高通滤波器,过小的α值对抑制噪声不利。α一般大于0.07。11相位超前校正网络的Bode图jωτ+1L(ω)/dBGj()ω=20dBcjαωτ+1[+20]10dB20lg1/α0dBωω1ατ11τmω=mατ1φ(ω)(L)ω=10lgmα40°1−αφmϕ=arcsin20°m1+α0°ω12第二节常用校正装置及其特性二、相位滞后校正网络sz−c11(s+1τ)τs+Gsc()==⋅=sp−+cββ()s+1()βττs1RR1+2零点:zc=−1τβ=>1大零点小极点R2极点:pc=−1βττ=RCz2c1jωτ+1β=>Gjc()ω=pcjβωτ+1ϕc()ωωτβωτ=−arctgarctg<0相角迟后13第二节常用校正装置及其特性ϕc(ωωτβωτ)=arctg−<arctg0ωτβωτ−ϕω()=arctgc1+βωτ2211−βωm=ϕϕω==()arcsinτβmcm1+β110τ≈ω避免ωm在ωc附近c14第二节常用校正装置及其特性ωccτβωτ−ϕωcc()=−arctgωτcarctgβωτc=arctg221+βωτc⎡⎛⎞⎤β>>11ϕωcc()arct=−g⎢0.1⎜⎟1⎥⎣