如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
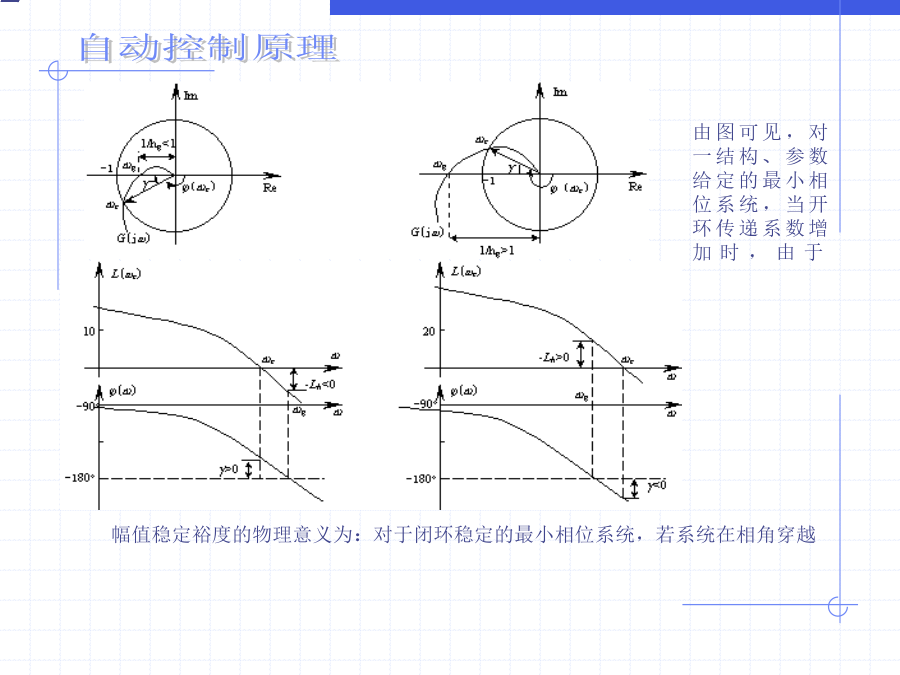
5.5控制系统的相对稳定性稳定裕度是衡量闭环系统的相对稳定程度的指标,也是系统的频域指标,与闭环系统的瞬态响应有关。对于最小相位系统(条件稳定系统除外),开环系统传递函数没有极点位于右半s平面,那么闭环系统稳定的充要条件是:开环系统幅相频率特性不包围(-1,j0)这一点,系统开环奈氏曲线与负实轴的交点应该在(-1,j0)点以右。由上一节的内容可知,开环奈氏曲线与负实轴的交点越靠近(-1,j0)点,系统的阶跃响应的振荡就越强,相对稳定性也越差。在讨论一个系统的稳定裕度时,是根据系统在稳定状态下,接近临界状态的程度来反映的。在频率分析方法中,对于开环稳定的系统,就是根据开环频率特性曲线接近(-1,j0)点的程度来表征。在控制系统的实际应用中,要求系统具备相当的稳定裕度,通常用相位裕度、幅值裕度两个指标来衡量系统的相对稳定性。从对比中不难看出:两个具有不同闭环主导极点的系统A和系统B,从时域分析的角度来看,系统A的闭环主导极点较系统B更远离虚轴,系统A较系统B具有更好的稳定性;从两个系统对应的频率特性曲线来看,系统B的频率特性曲线较系统A更靠近(-1,j0)点,系统B的稳定程度就稍低。5.5.2幅值穿越频率c与相位穿越频率g5.5.3相位裕度如果>0,相位裕度为正值,闭环系统稳定。反之,如果<0,则相位裕度为负值,闭环系统不稳定。相角稳定裕度的物理意义在于:对于闭环稳定的最小相位系统,在=c处,系统的相角如果再减小角度,系统将处于临界稳定状态;减小的角度大于后,系统将不稳定。为了使最小相位系统是稳定的,必须为正值。相位裕度是设计控制系统时的一个重要依据,描述系统的阻尼程度。后面将会分析,二阶系统的相位裕度与阻尼比ζ之间有一一对应的关系。通常,一个性能良好的控制系统,其相位裕度应具有45左右的数值。γ过低,系统的动态性能较差,对参数变化的适应能力弱;γ过高,则对系统及其组成元件要求较高,造成实现上的困难,或者经济性较差;或由于稳定程度过好,造成系统的过渡过程较为缓慢。5.5.4幅值裕度幅值稳定裕度的物理意义为:对于闭环稳定的最小相位系统,若系统在相角穿越频率g处幅值增大hg倍(或对数幅值上升Lh分贝),则系统将处于临界稳定状态。若幅值增大倍数大于hg,系统将变成不稳定;而不稳定系统,若开环放大系数缩小hg倍,系统将处于临界稳定。5.5.5系统的稳定裕度从控制工程实践得出,系统应具有30~60的相位裕量,幅值裕量Lh大于6dB(即hg>2)。对于最小相位系统,开环对数幅频特性和相频特性之间有确定的对应关系。要求相位裕量应在30~60之间,意味着开环对数幅频特性在穿越频率c上的斜率必须小于-40dB/十倍频,通常取-20dB/dec,且具有一定的宽度。适当的相位裕量和幅值裕量,可以防止系统中元件的参数和特性在工作过程中的变化对系统稳定性产生不良的影响,并可以提高系统抗高频干扰的能力。